3 feed - forward, Figure 6.16.3.1: feed-forward block description – GE Industrial Solutions DV-300 DC Drive Users Manual User Manual
Page 267
DV-300 Adjustable Speed Drives
——— FUNCTION DESCRIPTION ———
6
139
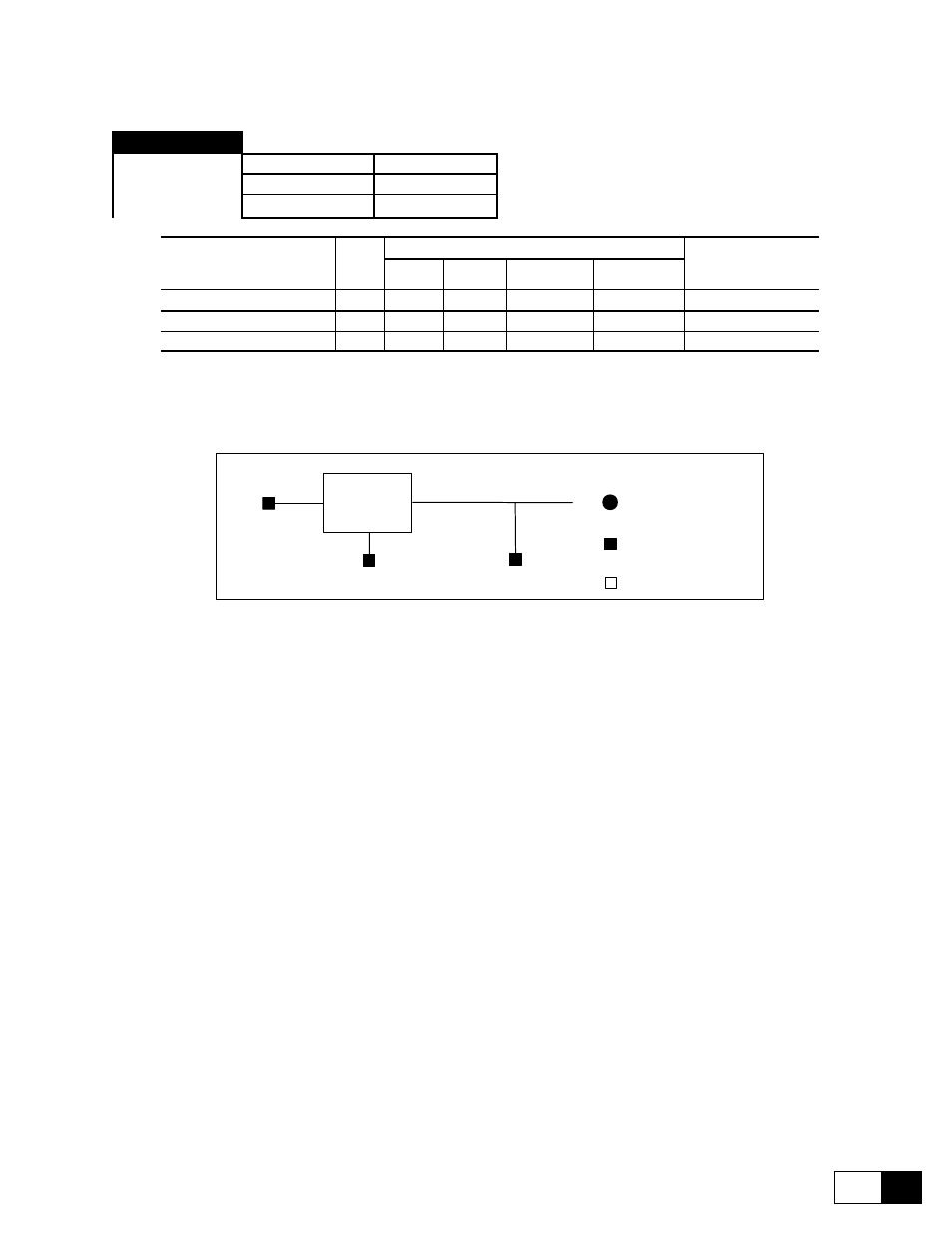
6.16.3.3 Feed - Forward
PID source
[786]
PID source
[787]
PID source gain
[758]
Feed-fwd PID
Parameter description
No.
Value
Standard
Configuration
min
max
Factory
American
Factory
European
PID source
786
0
65535
0
0
PID source gain
787
-100.000 +100.00
1.000
1.000
Feed-fwd PID
758
-10000
+10000
0
0
*
* This parameter can be set on an analog programmable input..
When used , the feed-forward signal represents the main reference of the regulator. Inside the regulator it will
be attenuated or amplified by the PID function and sent to the output as reference signal for the drive.
I/O Parameter
Parameter
Internal variable
LEGEND:
PID source
Gain
PID source gain
Feed-fwd PID
Figure 6.16.3.1: Feed-forward block description
PID source
Address of the parameter (Feed-forward value) containing the value which will be used
as PID source.
Number +2000H (8192 decimal) must be added to the parameter.
PID source gain
Multiplier of the input value to PID source.
Feed-fwd PID
Value of feed-forward
Through the parameter PID source, it is possible to select which point in the drive the feed-forward signal may
be sent. The selectable parameters are those indicated in the paragraph 10.4. “List of the high-priority param-
eters”. The measure units are those indicated in the notes at the end of this paragraph.
1. Programming example of the ramp output block (Parameter Ramp out) on PID source:
Menu OPTION
————> PID
————> PID source
————> PID source = 8305
The PID source must be set to the parameter number to which it will be associated, choosing it from paragraph
10.4. “List of high-priority parameters” (Ramp out has the decimal number 113).
To obtain the value, it must be added to the decimal value 8192 (fixed offset):
8192 + 113 = 8305.
If you need to set the feed-forward on analog input, given that they are not directly inserted in the ‘high-priority
parameters’, it is necessary to pass through a PAD 0.....PAD 15 parameter.