Yaskawa MEMOCON GL120 User Manual
Page 317
4.7 Motion Modules
— 4-261 —
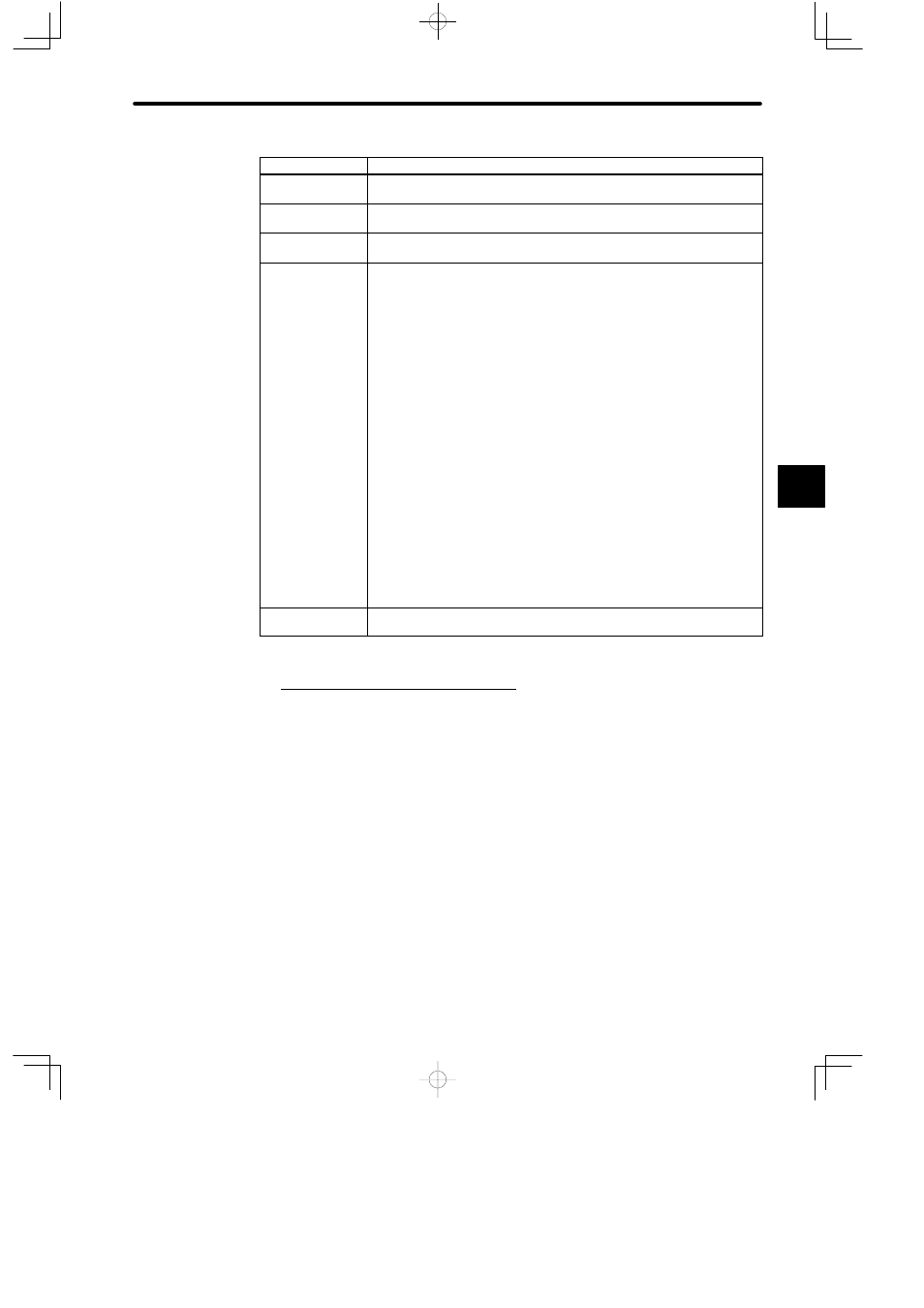
Items
Specifications
Backlash
Compensation
0 to 32,767 pulses: Enabled or disabled with parameters.
Electronic Gear
Function
Possible
Servodriver
Control
Analog command SERVOPACK. Compatible with both absolute and
incremental encoders.
Monitor
The following can be monitored from programming devices:
1) Command values
2) Current positions
3) Position errors
4) Current speeds
5) Command speeds
6) Error codes
7) No. of errors
8) No. of received steps for multi-step speed operation data
9) ROM version
10) Control status of One-axis Motion Module
11) I/O signal status of One-axis Motion Module
Parameter Setting
and Reading
You can set and read the parameters of the One-axis Motion Module from
the CPU Module.
4. Using a One-axis Motion Module
1) Number of Modules
a) The CPU Module will need the following references for each One-axis Motion Mod-
ule:
(1) 32 consecutive input relays
(2) 32 consecutive output coils
(3) 14 consecutive input registers
(4) 14 consecutive output registers
b) Therefore, how many One-axis Motion Modules can be used will depend on how
many of the above references are available in the CPU Module.
4