Pid control mode – Yokogawa Data Acquisition with PID Control CX2000 User Manual
Page 32
1-20
IM 04L31A01-01E
PID Control Mode
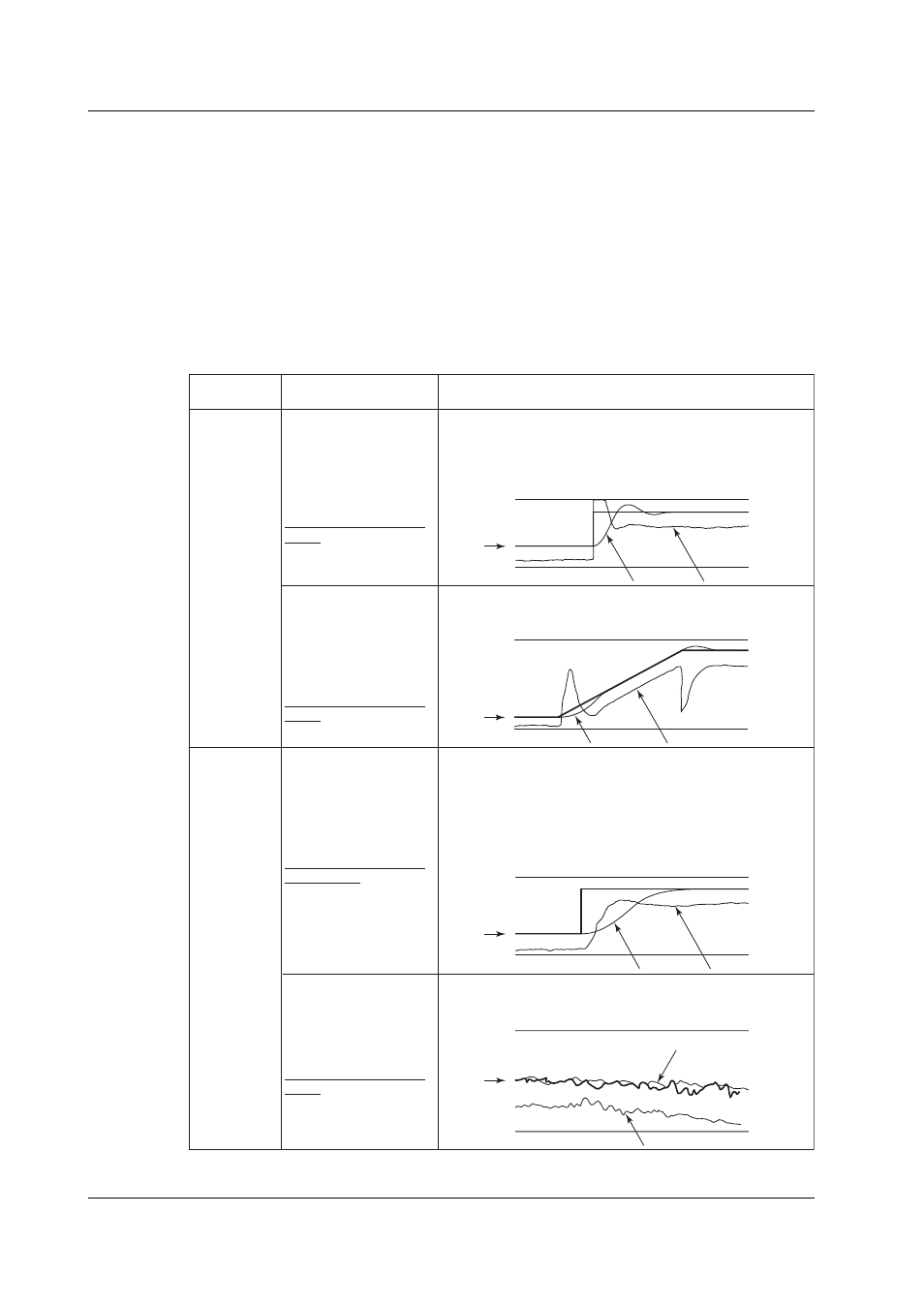
There are two PID control modes: standard PID control mode and fixed-point control mode. To
control the output so that the PV reaches the new SP quickly after the SP is changed, select
“standard PID control mode.” To perform a continuous fixed-point control, select “fixed-point
control.” As shown in the figure below, the control behavior varies depending on the selected
PID control mode. There are two control methods: PV derivative type PID control method and
deviation derivative type PID control method. As shown in the figure below, the control method is
automatically selected. In addition, the presence or absence of the control output bump at the
point of change of the SP is automatically selected. When performing program control in
standard PID control mode on models with the program control option, deviation derivative type
PID control is used during operation (except during hold and soak) and on the secondary loop of
cascade control. For all other cases, PV derivative type PID control is used.
Type of PID
Control Mode
Control Method
Description of the Control Operation
Standard PID
control mode
(Initial value)
PV derivative type PID
During operation in local
mode or auto mode
(only the primary side
during cascade control)
With bumps in the control
output at the time the SP
is changed
Deviation derivative
type PID
During operation in remote
mode (secondary side
during cascade control)
With bumps in the control
output at the time the SP
is changed
Employs a PV derivative type PID so that the output reaches
the new SP quickly after the target setpoint is changed. In PV
derivative type PID, the proportional terms (P) that are
proportional to the deviation that occurred due to the SP change
are output immediately, forcing the process value to quickly reach
the new SP.
By applying the derivative term (D) against the deviation that
occurs due to minute changes in the program pattern, the process
value quickly tracks the program pattern.
Fixed-point
control mode
PV derivative type PID
During operation in local
mode or auto mode
(only the primary side
during cascade control)
Without bumps in the
control output at the time
the SP is changed
PV derivative type PID
During operation in remote
mode (secondary side
during cascade control)
With bumps in the control
output at the time the SP
is changed
Use this function on continuous fixed-point control, if you do not
wish to disturb the PV caused by the sensitive reaction of the
control output (OUT) at the time the SP is changed.
In the case of "PV derivative type PID + no control output bumps,
" the output value (OUT) does not drastically change at the time
the SP is changed. The deviation is gradually eliminated using
only the integral term (I) against the deviationthat occurs.
Use this function on the secondary loop of cascade control.
A stable control output is achieved without sensitively reacting to
the output of the primary loop.
SP
SP
SP
SP
PV
OUT
PV
OUT
PV
OUT
OUT
PV
1.3 Basic Settings of Control