Yokogawa Data Acquisition with PID Control CX2000 User Manual
Page 16
1-4
IM 04L31A01-01E
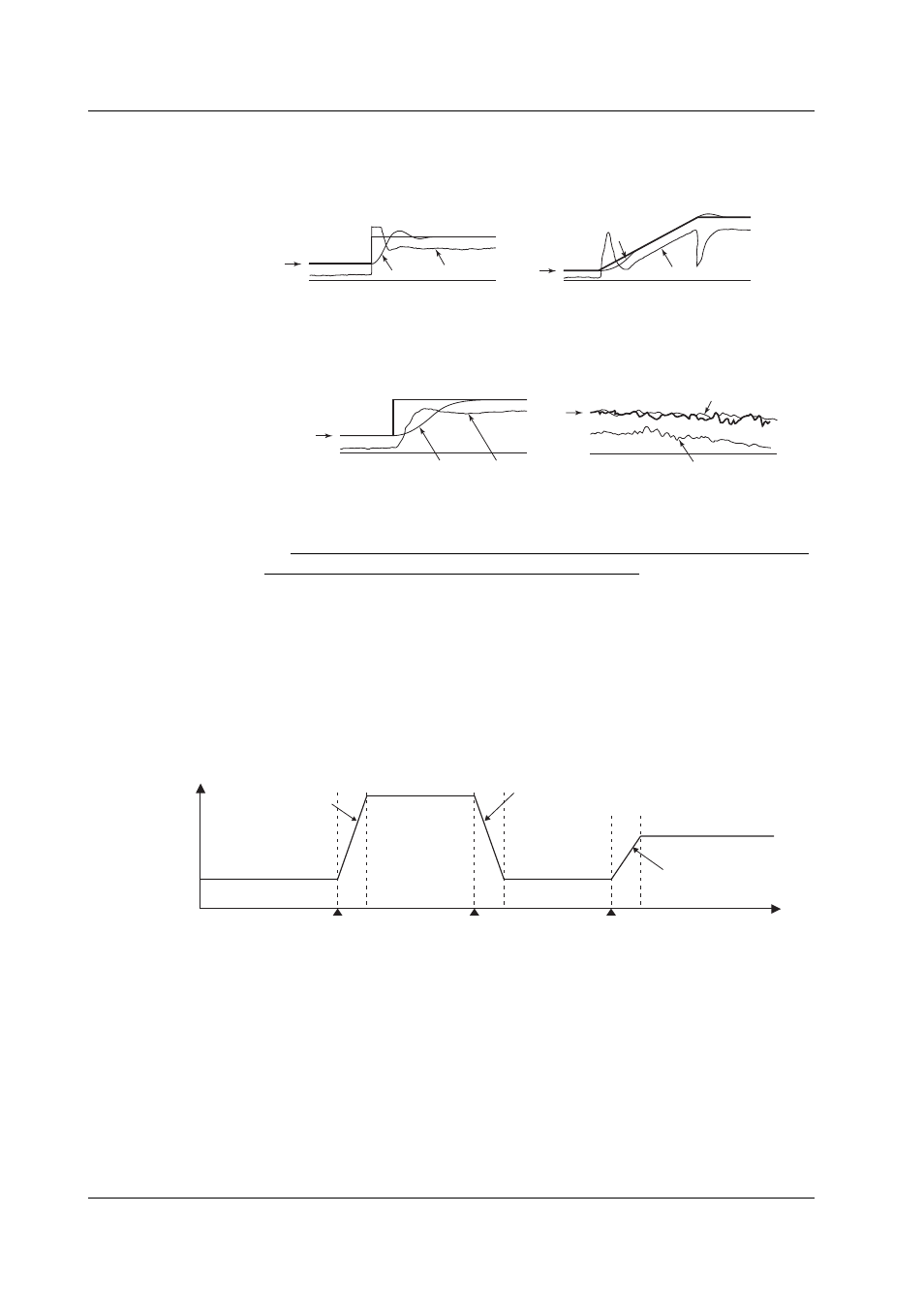
• Standard PID control
Controlled so that the control output reaches the new SP quickly after the SP is
changed.
SP
PV
OUT
SP
PV
OUT
PV derivative type PID
(with output bump)
Deviation derivative type PID
(with output bump)
• Fixed-point control
Select this mode if you wish to avoid the control OUT from reacting sensitively to the
SP change causing a disturbance in the control such as in the case with a continuous
fixed-point control.
SP
PV
OUT
SP
OUT
PV
PV derivative type PID (without output bump) PV derivative type PID (with output bump)
Control Parameters
The following control parameters are available. For each group, you can enter up to
eight sets of SPs and PID parameters as underlined below.
SP, PID constant, control output limiter, ON/OFF of the shutdown function, manual reset
value, relay hysteresis, control action direction, preset output, SP tracking, PV tracking,
setpoint limiter, output velocity limiter, auto/manual switching of the over-integration
prevention function (anti-reset windup), ON/OFF of the control output suppression
function, and SP ramp-rate.
PID Selection Method
The following two methods are available.
• Target setpoint selection method
A group (up to 8 groups) consisting of a SP and PID parameters is registered to a PID
number (SP number). By specifying the SP number using keys on the front panel,
external contact input, or via communications, the SP and PID parameters are
switched.
SP1
SP3
SP1
SP2
(No.1 PID)
(No.3 PID)
(No.1 PID)
(No.2 PID)
PV Rise according to the
setpoint ramp-up
setting
SPn: Target setpoint number
Rise according to the
setpoint ramp-up
setting
Switch from SP1 to SP3
Switch from SP3 to SP1
Switch from SP1 to SP2
Time
Fall according to the
setpoint ramp-down
setting
1.2 Control Function Overview