Yokogawa Data Acquisition with PID Control CX2000 User Manual
Page 254
7-8
IM 04L31A01-01E
Clearing Alarms When They Occur
The following operation is valid only when [Behavior] is set to [Hold] or [Indicator] is
set to [Hold].
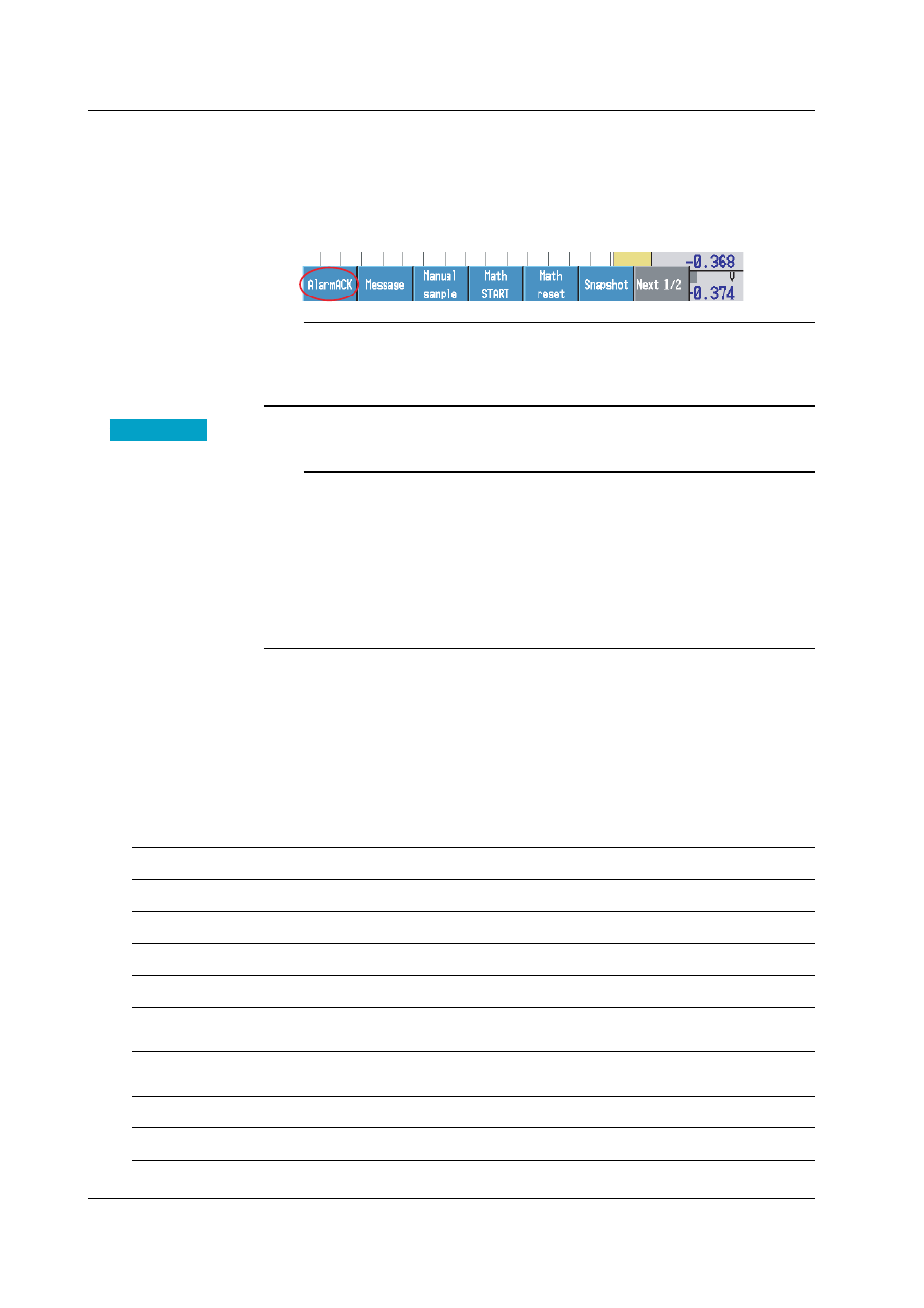
1. In operation mode, press the
FUNC ke
y.
A soft key menu is displayed at the bottom of the display.
2. Press the
[AlarmACK] soft key
.
Note
•
This operation can be assigned to the USER key. If it is, alarms can be cleared simply by
pressing a single key. For the procedure in assigning a function to the USER key, see
section 11.1, “USER Key Assingnment and Operation.”
•
This operation is common with control alarms.
Setup Items
Setting the Alarm Output
Note
Set the alarm output after setting the range.
•
All alarm settings of a channel are cancelled in the following cases.
•
When the input type ([Volt], [TC], etc.) is changed.
•
When the input range is changed.
•
When the upper or lower limit of the span or scale is changed on channels that are set
to scale or square root computation (including changes in the decimal point position).
•
When [Range] is set to [Skip], alarm output cannot be specified (the alarm entry box is grayed).
•
For a description on the alarm setting of computation channels, see
section 10.3, “Setting
Alarms on Computation Channels.”
• First-CH/Last-CH
Set the target channel for setting the alarm output. The target channels are common
with the range setting.
• Off/On
Up to 4 alarms can be set to a single channel. For each of the alarms [1] to [4], select
[On] to enable an alarm, [Off] to disable it. If [On] is selected, [Type], [Value], and
[Relay On/Off] entry boxes appear.
• Type
Select the alarm type (conditions for activating the alarm) from the following eight types.
Name
Displayed Description
Symbol
High limit alarm
H
An alarm occurs when the measured/computed value is greater than or equal to the
alarm value.
Low limit alarm
L
An alarm occurs when the measured/computed value is less than or equal to the alarm
value.
Difference
h
An alarm occurs when the difference in the measured values of two channels is greater than or
high limit alarm*
1
equal to the difference high limit alarm value.
Difference
l
An alarm occurs when the difference in the measured values of two channels is less than or
low limit alarm*
1
equal to the difference low limit alarm value.
High limit on
R
The rate-of-change of the measured values is checked over a certain interval (set using the
rate-of-change alarm*
2
[Increase] entry box of basic alarm settings). An alarm occurs if the rate-of-change of the
measured value in the rising direction is greater than or equal to the specified value.
Low limit on
r
The rate-of-change of the measured values is checked over a certain interval (set using the
rate-of-change alarm*
2
[Decrease] entry box of basic alarm settings). An alarm occurs if the rate-of-change of the
measured value in the falling direction is less than or equal to the specified value.
Delay high limit alarm
T
An alarm occurs when the measured value remains above or equal to the alarm value for
the specified delay.
Delay low limit alarm
t
An alarm occurs when the measured value remains below or equal to the alarm value for
the specified delay.
*1 Can only be specified on difference computation channels.
*2 Can only be specified on measurement channels.
7.2 Settings Related to Measurement Alarms