Yokogawa Data Acquisition with PID Control CX2000 User Manual
Page 15
1-3
IM 04L31A01-01E
Explanation of Functions
3
2
1
4
5
6
7
8
9
10
11
12
13
14
Control Signal Output
The terminal provides universal output. A single control output terminal block can control
two loops (except cascade control which uses two loops for one control). The following
types of control output can be selected.
• PID control output
• Time proportional PID
Outputs ON/OFF signals with a pulse width that is proportional
relay contact output:
to the time as relay contact signals according to the computed
PID value.
• Time proportional PID
Outputs ON/OFF signals with a pulse width that is proportional to
voltage pulse output:
the time as voltages according to the computed PID value.
• Current output (continuous Continuously outputs a current (analog signal) that is
PID control output):
proportional to the computed PID value.
• On/off control relay
Outputs on/off control relay contact signals according to the
contact output:
polarity (positive/negative) of the deviation between the SP
and the PV.
• Analog Retransmission
Outputs the specified computed result, not the computed PID value.
Control Methods
PID control and ON/OFF control are available. The following control modes can be
selected for both PID control and ON/OFF control.
Control Mode
In PID control, the following three control modes are available in relation to the PV input
selection.
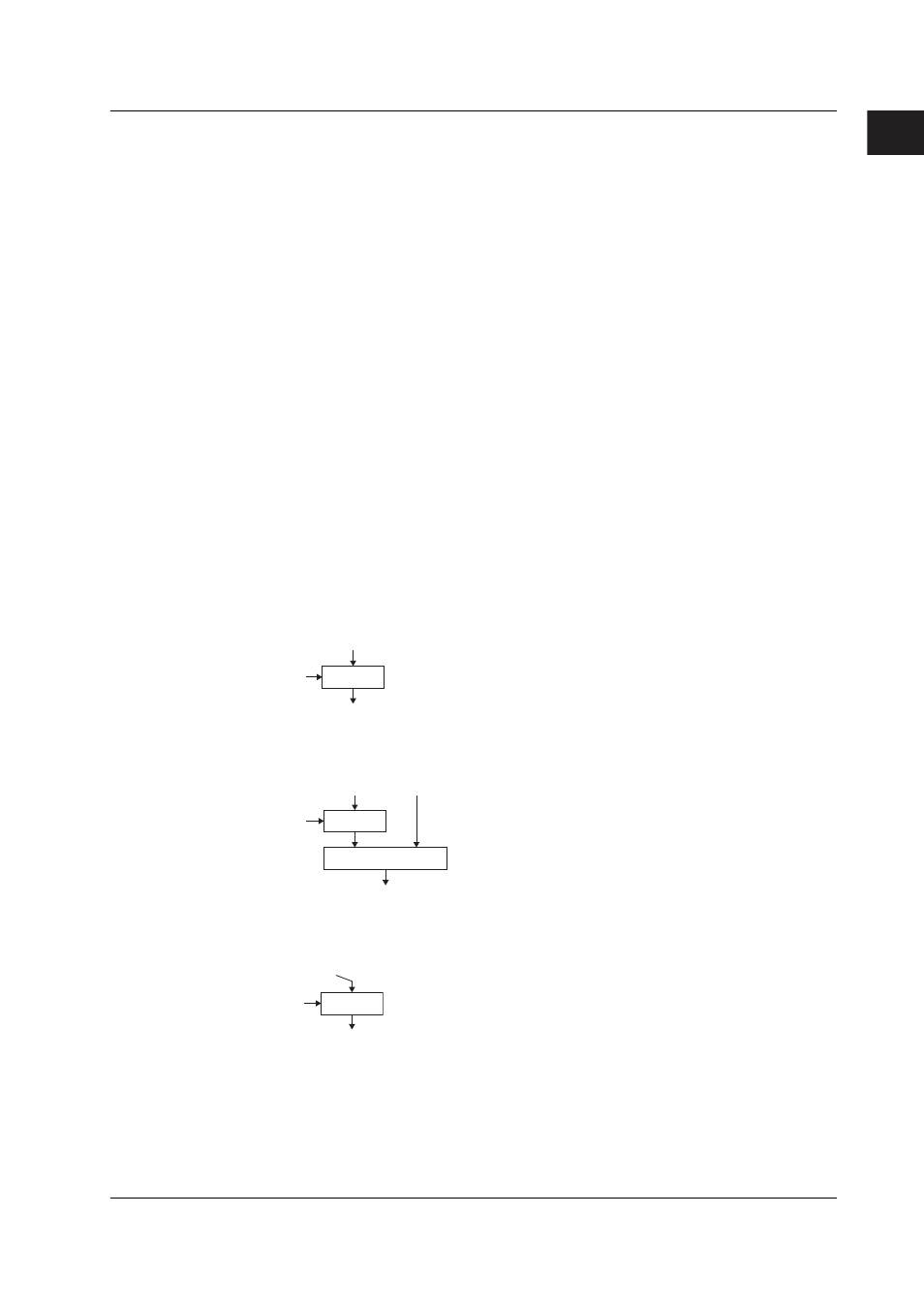
• Single-loop control
Basic control consisting of a single system of controller CPU.
PID
SP
PV
OUT
• Cascade control
Control consisting of two systems of controller CPUs that use the primary control
output as the secondary control SP.
PID
SP
PV1
PV2
PID
OUT
• Loop control with PV switching
Single-loop control that is switched between two PV inputs (PV1 and PV2) according
to a specified condition.
PID
SP
PV1 PV2
OUT
In PID control, you can also select the PID control mode.
PID Control Mode
Depending on the desired operation at the time the SP is changed, you can select the
PID control mode from below. The selections between the PV derivative type and
deviation derivative type as well as the presence or absence of the control output bumps
are automatically made according to the PID control mode and operation mode (fixed-
point control or program control).
1.2 Control Function Overview