Metrohm viva 1.0 (process analysis) User Manual
Page 851
■■■■■■■■■■■■■■■■■■■■■■
7 Devices
viva 1.0 (for Process analysis)
■■■■■■■■
839
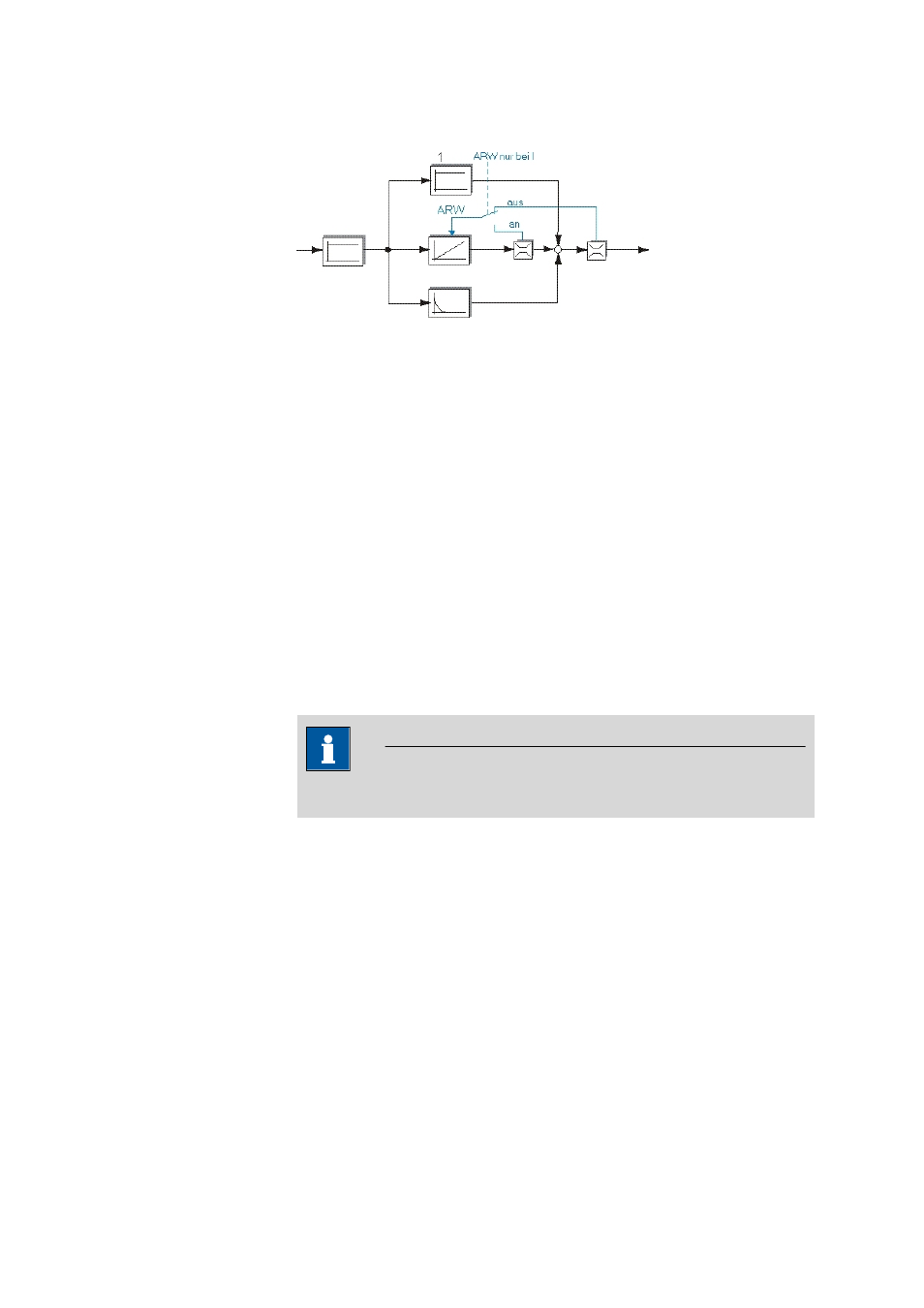
ARW
K
P
Controller amplification / controller coefficient
P in feedback
Input with which the input value of the internal P element can be selected
(see "Action diagram", page 837). The default setting is OFF.
T
n
Integral action time. The I component is deactivated when this is parame-
terized to T#0s.
T
v
Derivative action time. The D component is deactivated when this is para-
meterized to T#0s.
D in feedback
Input with which the input variable of the internal D element can be
selected (see "Action diagram", page 837). The default setting is OFF.
T
d
Damping time
Upper limit
Upper limit at which the integration is stopped and to which the output is
limited (ARW measure).
NOTE
This is not a guaranteed limit for the total output.
ARW only with I
If this parameter is OFF (default setting), then the integration of the I
component is halted when the entire controller output reaches the upper
or lower limit. An absolute limitation of the output is thus implicitly possi-
ble, regardless of the behavior of the input and the setpoint value (see
example below). If this parameter is ON, then the integration is halted
when the I component (the integrator output) reaches a limit (see "Action
diagram", page 837). The limit then no longer functions as an absolute
limit for the output, because the variable P and D components also come
into play. The behavior of a normal PID controller, i.e. to reflect fluctua-
tions of the control deviation at the output, is not lost in the saturation.