Festo Контроллер позиционирования CPX-CMAX User Manual
Page 267
5. Parameter
5−79
Festo P.BE−CPX−CMAX−CONTROL−EN en 0908NH
Supply pressure
PNU
PNU: 1141
Index: 1
Max index: 1
Class: Var
Data type: int32
Values
Unit: Pressure (index = 4)
Linear drive
Semi−rotary drive
Dimension
Default
Minimum
Maximum
Dimension Default
Minimum
Maximum
SI 0,1 bar
60
30
100
0,1 bar
60
30
100
Imperial 1 psi
85
44
145
1 psi
85
44
145
Supply pressure applied to the valve.
o
The parameter value cannot be changed.
ý
Writing permissible only in commissioning/parametrising mode with disabled controller.
o
This parameter can be written by FCT without higher−order controller.
ý
After writing, controller recalculation is carried out.
Basic massload without workpiece
PNU
PNU: 1142
Index: 1
Max index: 1
Class: Var
Data type: int32
Values
Unit: Mass (index = 5)
Linear drive
Semi−rotary drive
Dimension
Default
Minimum
Maximum
Dimension Default
Minimum
Maximum
SI 0.1 kg
50
5
20.000
1 kg cm
2
50
1
2.000
imperial 1 lb
10
1
4.409
0.1 lb in
2
200
2
6.834
Basic mass or existing mass for all positioning tasks.
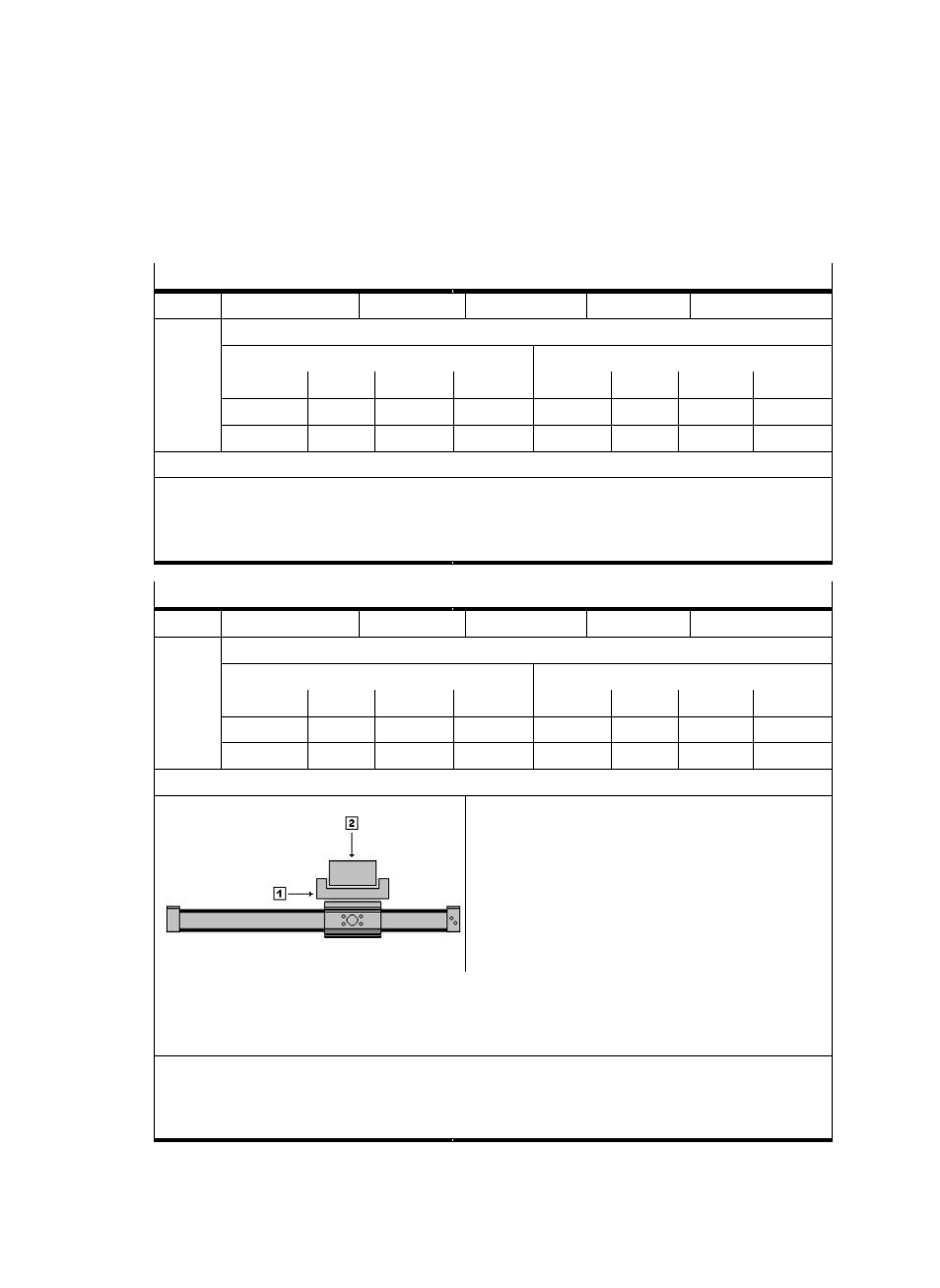
Calculation of the moving mass:
1 Moving mass without workpiece (PNU 1142)
This is the mass of the loading device fixed to the
slide. This mass must always be moved by the drive
(minimal mass to be moved).
2 Current workpiece mass (PNU 605/410/...)
If the drive also has to move workpieces of different
weights, this variable share must be defined as workĆ
piece mass.
The CMAX calculates the sum of both mass data for every positioning process. The respective mass
is determined based on the specified variable workpiece mass (PNU 605 is the global default value).
However, it is also possible to specifiy the workpiece mass individually in each record (PNU 410), in
jog mode (PNU 536) and in direct mode (PNU 544 or 51).
o
The parameter value cannot be changed.
ý
Writing permissible only in commissioning/parametrising mode with disabled controller.
o
This parameter can be written by FCT without higher−order controller.
ý
After writing, controller recalculation is carried out.