Festo Контроллер позиционирования CPX-CMAX User Manual
Page 242
5. Parameter
5−54
Festo P.BE−CPX−CMAX−CONTROL−EN en 0908NH
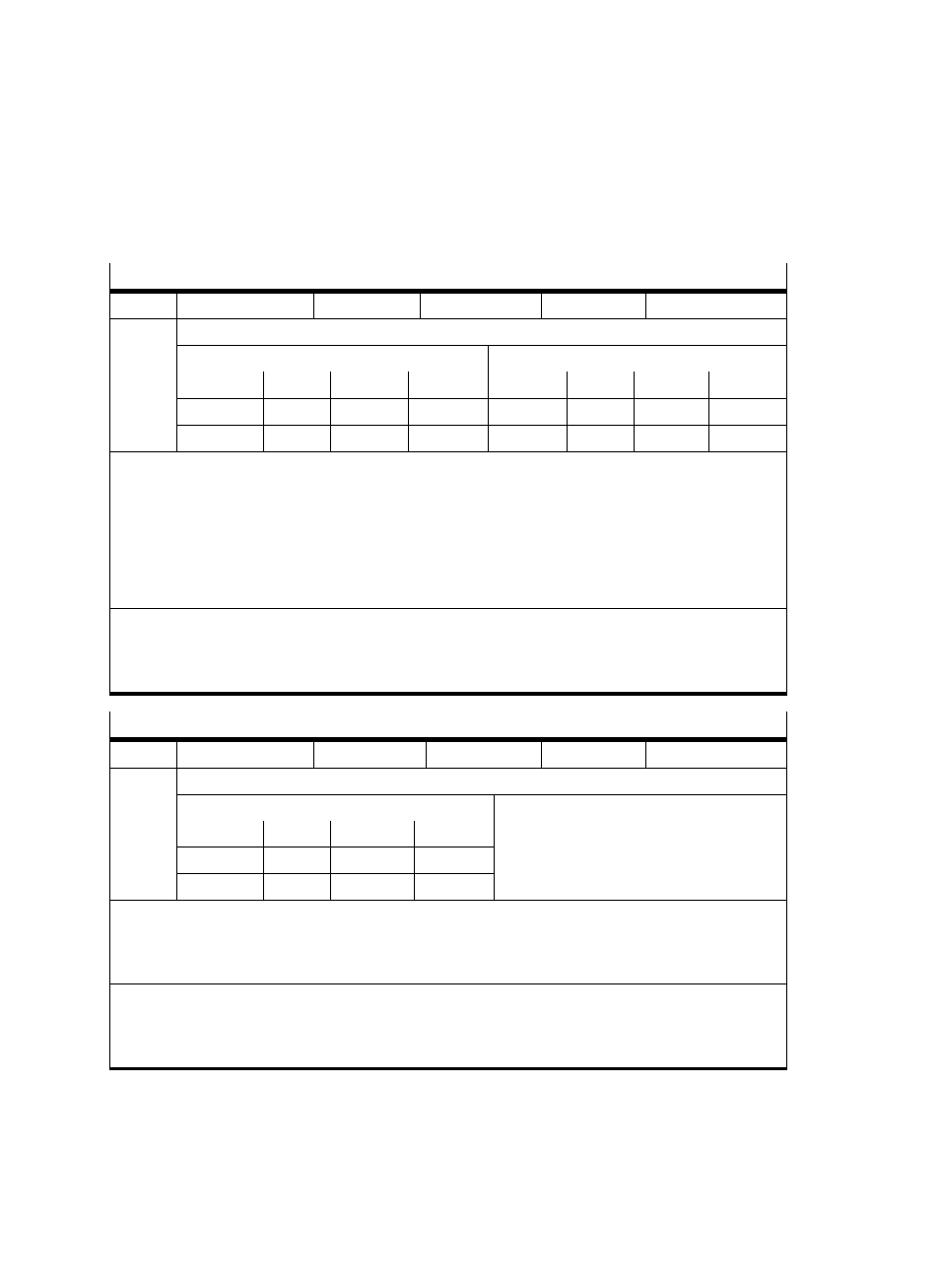
Permitted stroke during force control
PNU
PNU: 510
Index: 1
Max index: 1
Class: Var
Data type: int32
Values
Unit: Position (index = 1)
Linear drive
Semi−rotary drive
Dimension
Default
Minimum
Maximum
Dimension Default
Minimum
Maximum
SI 0.01 mm
5.000
100
1.000.000 0,1
°
100
10
100.000
Imperial 0.001 in
2.000
39
393.701
0,1
°
100
10
100.000
Maximum permitted stroke with active force control.
With active force control, the actual position relative to the start position must not change by more
than the amount specified in this parameter. In this way you can ensure that, if force control is actiĆ
vated by mistake (Workpiece missing" for example), the axis will not perform an uncontrolled moveĆ
ment.
This parameter is only taken into account during force control, if the CMAX has Operation enabled."
status.
Monitoring can be deactivated by setting the bits RCB1.XLIM or CDIR.XLIM.
o
The parameter value cannot be changed.
o
Writing permissible only in commissioning/parametrising mode with disabled controller.
o
This parameter can be written by FCT without higher−order controller.
o
After writing, controller recalculation is carried out.
Lower limit setpoint force)
PNU
PNU: 511
Index: 1
Max index: 1
Class: Var
Data type: int32
Values
Unit: Force (index = 3)
Linear drive
Semi−rotary drive
Dimension
Default
Minimum
Maximum
Force control is not permissible with semi−
d
SI 1 N
0
−100.000
0
p
rotary drives.
Imperial 1 lbf
0
−22.481
0
Smallest permitted setpoint value for a force control. A smaller setpoint value leads to a fault or
warning.
If both the smallest and the largest (PNU 512) permissible force setpoint value are set to zero, the
setpoint limits are ignored when executing a force task.
o
The parameter value cannot be changed.
o
Writing permissible only in commissioning/parametrising mode with disabled controller.
o
This parameter can be written by FCT without higher−order controller.
ý
After writing, controller recalculation is carried out.