Festo Контроллер позиционирования CPX-CMAX User Manual
Page 248
5. Parameter
5−60
Festo P.BE−CPX−CMAX−CONTROL−EN en 0908NH
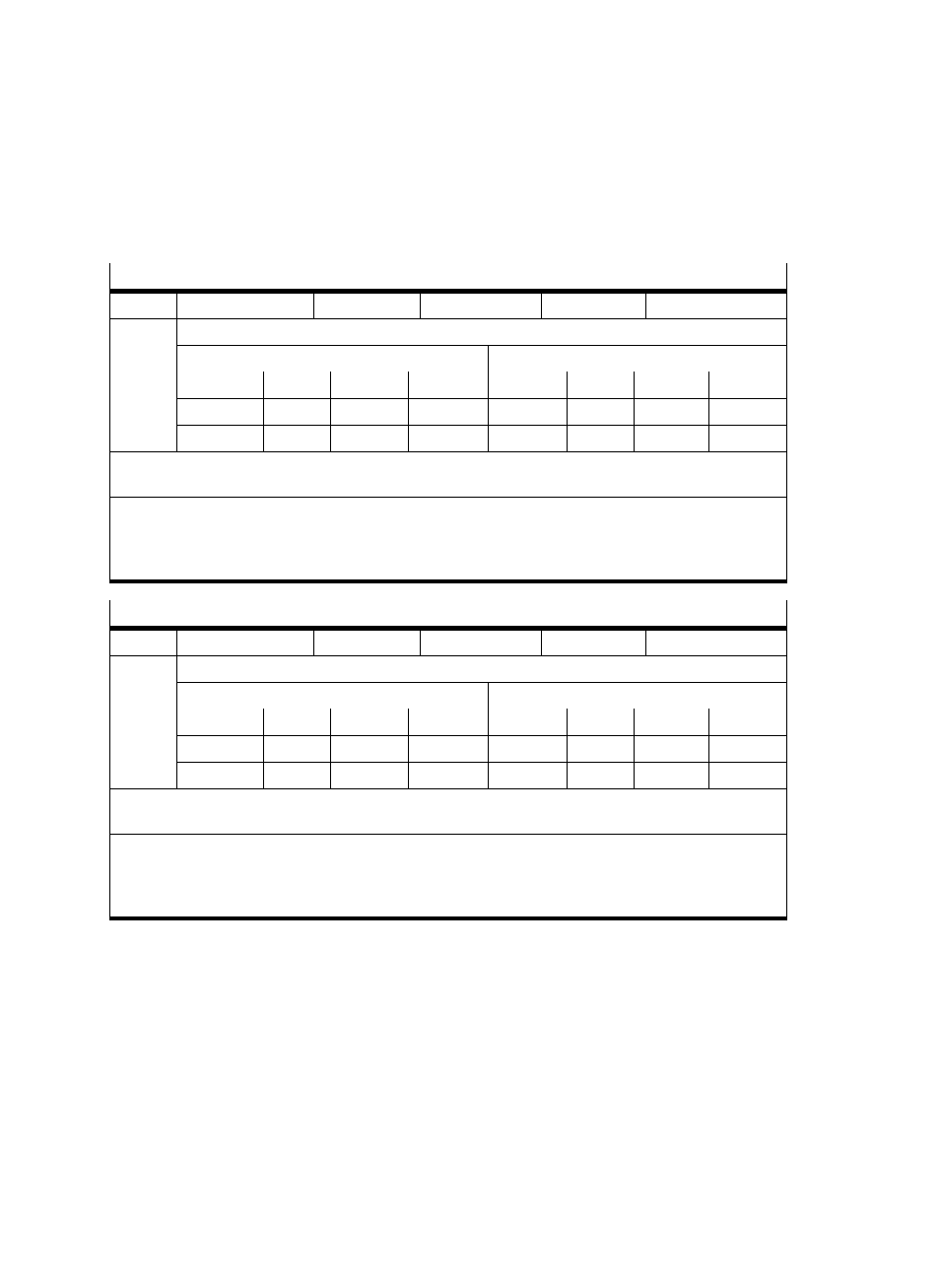
Jog mode acceleration
PNU
PNU: 532
Index: 1
Max index: 1
Class: Var
Data type: int32
Values
Unit: Acceleration (index = 7)
Linear drive
Semi−rotary drive
Dimension
Default
Minimum
Maximum
Dimension Default
Minimum
Maximum
SI 0,001 m/s
2
100
10
100.000
1
°/s
2
100
10
100.000
Imperial 0.01 ft/s
2
30
3
32.808
1
°/s
2
100
10
100.000
Jogging acceleration.
Depending on PNU 521:01, the corresponding default value is used instead, if necessary.
o
The parameter value cannot be changed.
o
Writing permissible only in commissioning/parametrising mode with disabled controller.
o
This parameter can be written by FCT without higher−order controller.
o
After writing, controller recalculation is carried out.
Jog mode deceleration
PNU
PNU: 533
Index: 1
Max index: 1
Class: Var
Data type: int32
Values
Unit: Acceleration (index = 7)
Linear drive
Semi−rotary drive
Dimension
Default
Minimum
Maximum
Dimension Default
Minimum
Maximum
SI 0,001 m/s
2
500
10
100.000
1
°/s
2
500
10
100.000
Imperial 0.01 ft/s
2
150
3
32.808
1
°/s
2
500
10
100.000
Jogging deceleration.
Depending on PNU 521:01, the corresponding default value is used instead, if necessary.
o
The parameter value cannot be changed.
o
Writing permissible only in commissioning/parametrising mode with disabled controller.
o
This parameter can be written by FCT without higher−order controller.
o
After writing, controller recalculation is carried out.