1 acceleration and deceleration – Rockwell Automation 8520-ARM2 9/Series CNC AMP Reference Manual Documentation Set User Manual
Page 298
Acc/Dec Parameters
Chapter 10
10-2
The parameters in these subsections cover linear and exponential
acceleration for the control. Some are global parameters (they affect all
axes) and some can be entered independently for each axis.
Proper setting of these parameters is necessary for accurate, efficient, and
safe machine performance.
In general, acceleration and deceleration times need to be increased when
attempting to operate a machine with high gain and minimum following
error. If not, the machine may frequently shut down due to feedback
errors when the axes start and stop.
Calculating your Linear Acc/Dec Ramp
Assuming your initial gain of position loop has been selected,
configuration of the Linear Acc/Dec ramp is a straight forward calculation.
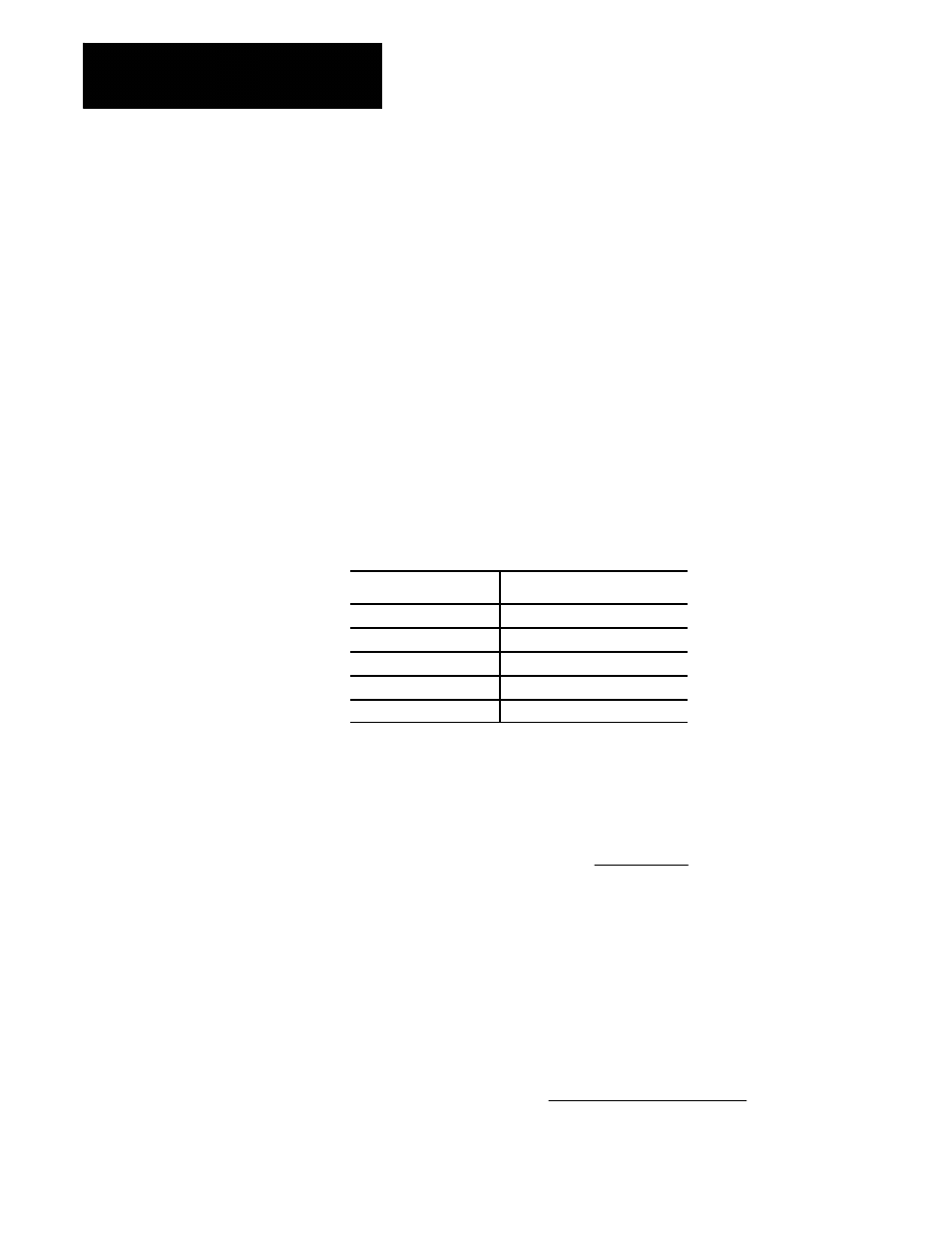
The position loop gain sets the overall response time for the servo. For a
given gain, the time required to go from one steady state velocity to
another steady state velocity is a constant:
Position Loop Gain
Approximate Response Time
1/2 IPM/mil
240 msec
1 IPM/mil
120 msec
2 IPM/mil
60 msec
3 IPM/mil
30 msec
4 IPM/mil
15 msec
The approximate Response Time (in the table on page 10-2) is inversely
proportional to the position loop gain. You can calculate it if it does not
appear in the table above by applying the proportion. Simply divide
120 msec by your position loop gain.
120 msec.
Position Loop Gain
Approximate Response Time =
Applying an Acc/Dec ramp that is steeper than the actual response curve of
the servo is the same as applying a step function with no Acc/Dec ramp.
For the Acc/Dec ramp to have any effect on the operation of the servo the
ramp must be below the response curve of the servo. If you selected
Closed Loop for the position loop type, the approximate response time of
your servo, and the maximum contouring speed, the correct Acc/Dec ramp
can be calculated directly:
Maximum Contouring Speed (IPM)
Approximate Response Time (msec)
Linear Acc/Dec Ramp =
10.1
Acceleration and
Deceleration