1 threshold for friction comp – Rockwell Automation 8520-ARM2 9/Series CNC AMP Reference Manual Documentation Set User Manual
Page 254
Servo Parameters
Chapter 7
7-108
Function
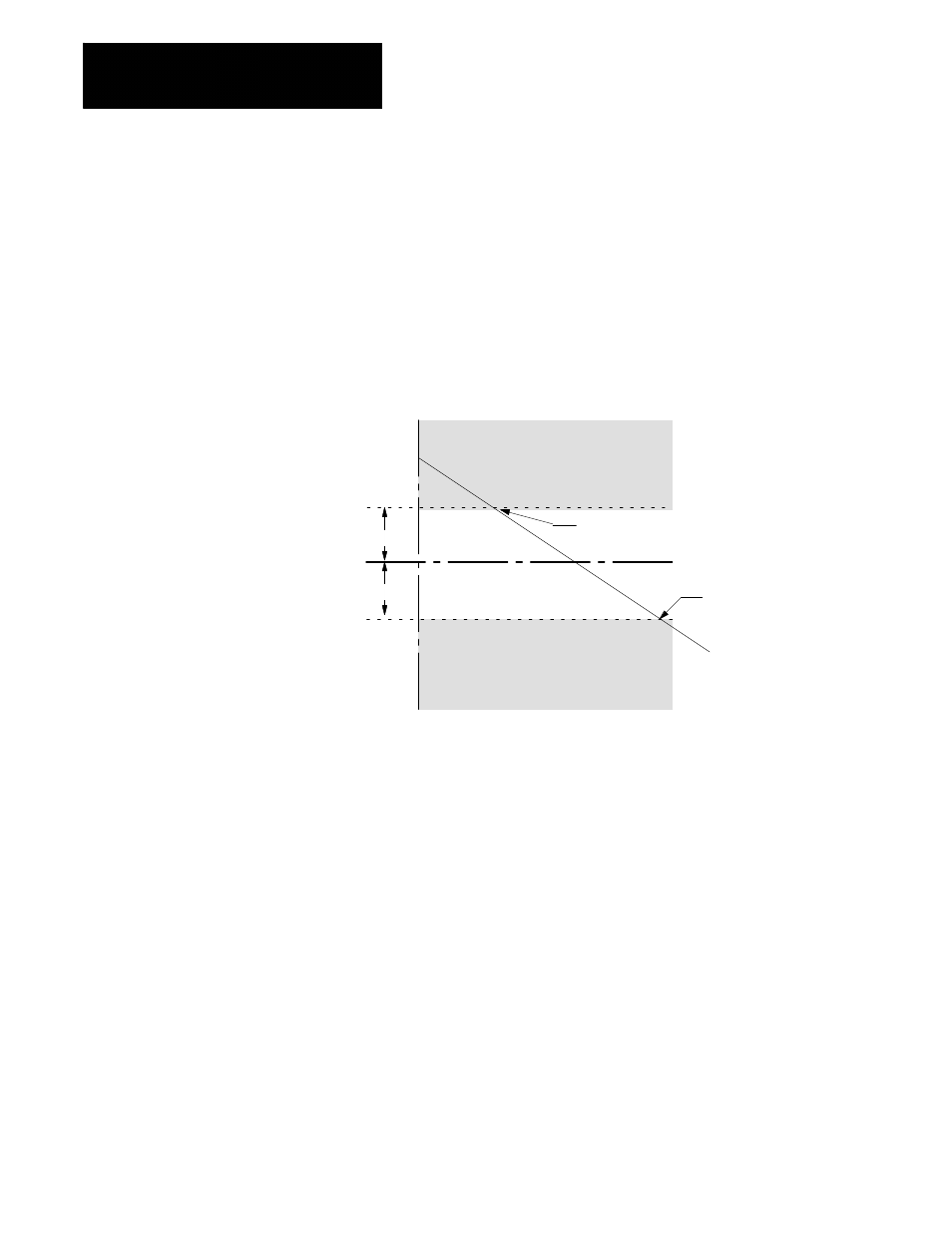
This parameter specifies the velocity (in terms of feedback counts of
following error) at which the control adds the “Stiction Compensation
Torque” value to the positive or negative dynamic friction value. When
the following error drops below this threshold value, both stiction and
friction compensation are zero. When the following error is above this
threshold, the positive or negative dynamic friction value is enabled.
Additionally when the following error value crosses this following error
threshold at the beginning of a move, the additional Stiction Compensation
Torque value is added to the dynamic friction value.
Time
Following Error
0
Threshold for Friction Compensation
Stiction Compensation Torque
added for one Servo Scan as
following error crosses threshold
Threshold for Friction Compensation
Positive Friction Compensation Enabled
Negative Friction Compensation Enabled
Friction Compensation Disabled as
following error drops below threshold
The units of this parameter are position feedback counts, and not
programming resolution units. Using position feedback counts simplifies
the adjustment of the threshold.
The same threshold value will be used in the positive and negative
positions. While the following error counts are greater than this threshold,
the friction compensation is applied to the torque command. When the
magnitude of the following error counts crosses the threshold at the
beginning of a move, stiction compensation will be applied on the
transition. For example setting this parameter to 10 means that when the
following error is between:
0 and 9 counts — Compensation for friction is zero
10 counts or higher — Friction compensation is added
the first iteration that reaches or exceeds 10 — Stiction and Friction is
added for one servo iteration
7.6.1
Threshold for Friction Comp