9 current proportional gain – Rockwell Automation 8520-ARM2 9/Series CNC AMP Reference Manual Documentation Set User Manual
Page 243
Servo Parameters
Chapter 7
7-97
Function
This parameter is only available on 9/260 or 9/290 systems that use the
8520 digital 3 axis servo cards.
This is a scaling parameter used to create a portion of the current command
for a particular servomotor.
In the control, Current Proportional Gain is multiplied by the current
error. Current Integral Gain is multiplied by the summation of current
error. These two products are added to form the current command.
Important: If the motor is not a digital servomotor, this parameter is not
used. It is recommended that the default value be left here. If using a
standard motor, the correct value for this parameter is entered
automatically. Altering it here has no effect.
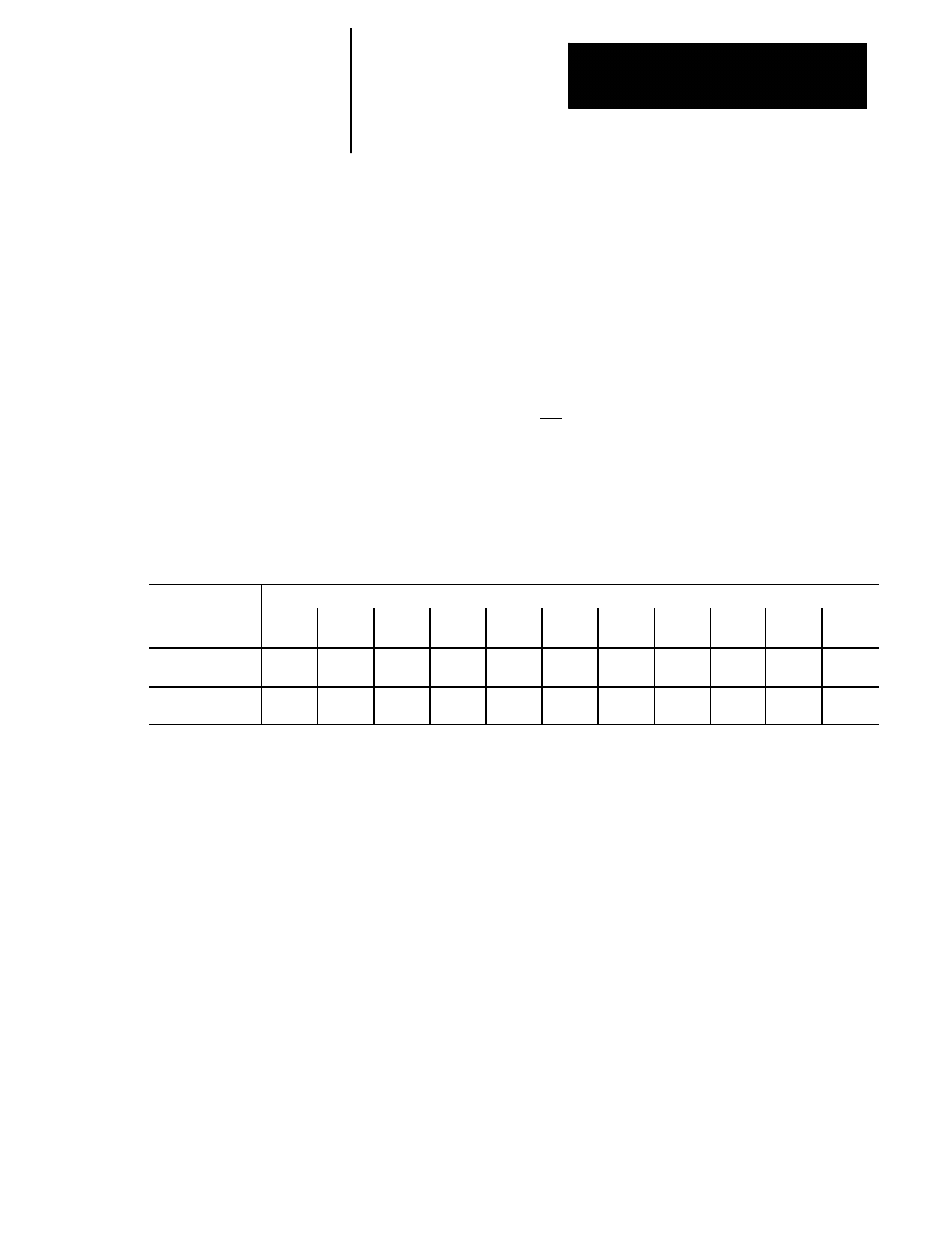
The following table is provided for reference only.
Table 7.F
Current Proportional Gain Values for Standard Motors
MOTOR TYPE
8500
A1C
8500
A2C
8500
B1C
8500
B2C
8500
B3C
8500
B3A
8500
A1D
8500
A2D
8500
A3D
8500
B1D
8500
B2D
Peak Current
200%
1664
1664
2304
2432
2688
2816
1664
1664
1664
2304
2560
Peak Current
300%
2048
2048
3072
3200
3456
3584
2048
2048
2048
3072
3328
If a nonstandard motor is to be used, the initial value for this parameter
must be determined through extensive motor testing. For assistance call
Allen-Bradley Commercial Engineering at (440) 646-5000.
Generally, if set too high, the axis is underdampened and oscillation
results. If set too low, the axis is overdampened and requires too much
time to reach position.
7.4.9
Current Proportional Gain