6 friction parameters – Rockwell Automation 8520-ARM2 9/Series CNC AMP Reference Manual Documentation Set User Manual
Page 253
Servo Parameters
Chapter 7
7-107
The parameters in this section are typically used on systems where friction
is a problem. Symptoms of high friction systems can include:
position error lag at the beginning of a move
position overshoot and slow recovery at the end of a move
position error on a circular quadrant boundaries
These parameters adjust the output torque of the system to overcome the
dynamic friction that occurs during a move, or the static friction (stiction)
that occurs at the start of a move.
Friction parameters are used on all digital systems and on analog systems
that use the Tachless Software Velocity Loop feature (loop type digital or
position/velocity).
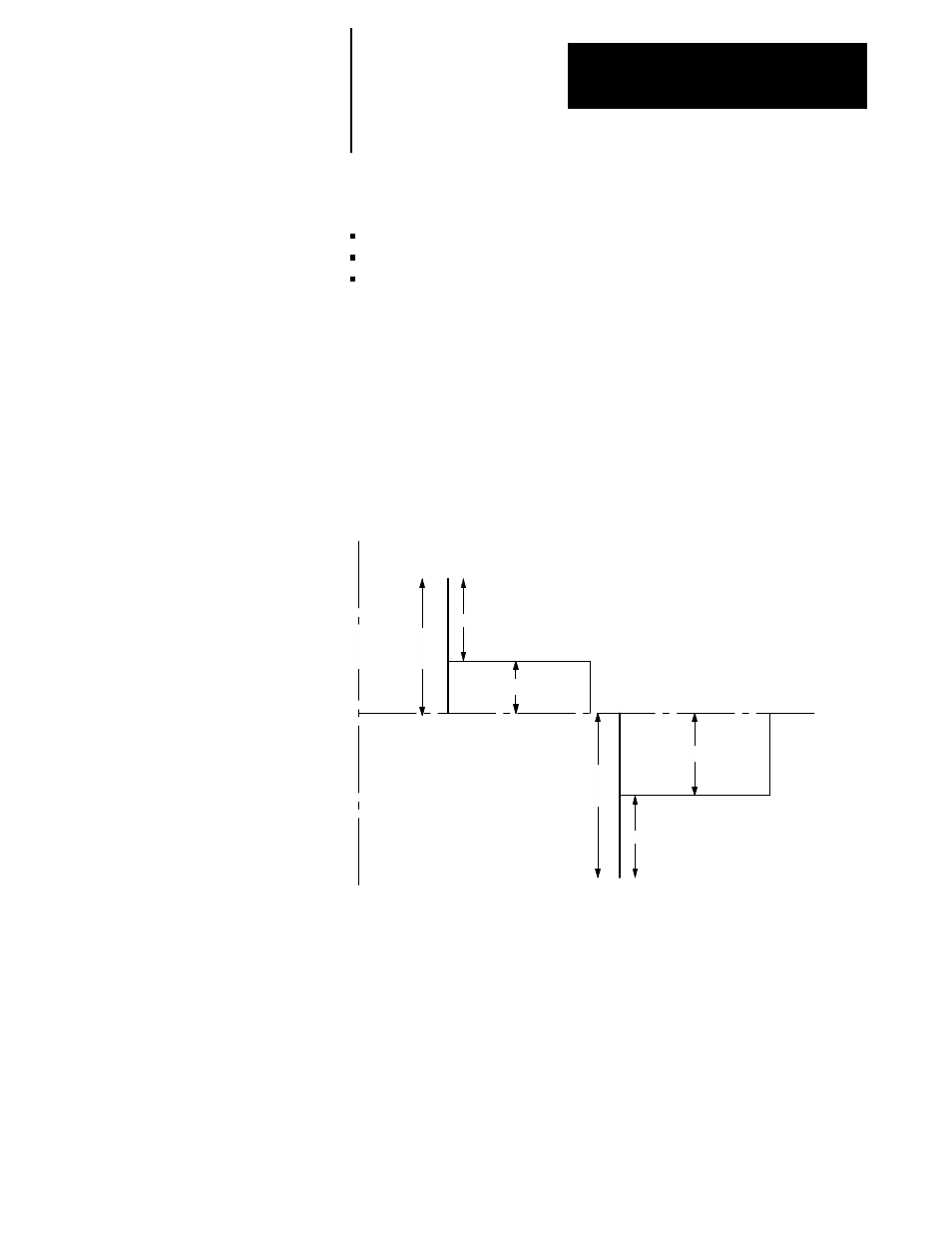
The following figure illustrates a positive and negative move showing the
amount of torque to initiate a move is higher than the torque necessary to
keep the axis moving.
Time
% Motor Rated
Torque
0
Positive Dynamic Friction
Stiction Compensation Torque
Stiction Compensation Torque
Negative Dynamic Friction
% Torque Needed to Overcome
Negative Static Friction
(Stiction or Breakaway Torque)
% Torque Needed to Overcome
Positive Static Friction
(Stiction or Breakaway Torque)
Note: The % Torque applied to overcome the
positive or negative static friction is equal to the
sum of the stiction compensation torque and the
dynamic friction torque.
7.6
Friction Parameters