1 servo position loop type – Rockwell Automation 8520-ARM2 9/Series CNC AMP Reference Manual Documentation Set User Manual
Page 171
Servo Parameters
Chapter 7
7-25
Function
There are five different position loop algorithms that you can choose from.
Open Loop
This is used for the spindle or for any motor that the control is not to
close the position loop. Typically these motors are connected through
the ANALOG OUT connector, or TB3 on the 9/230. Some open--loop
motors can be equipped with a position feedback device which provides
the control with position information (for features such as IPR or
threading) but is not used for closed--loop motion control. The control
determines if there is a position feedback device based on your setting
of the parameter Position Loop Feedback Port. Refer to Figure 7.14 and
Figure 7.15.
Important: Spindles are always configured as “Open Loop”. The loop
type will be changed by the software during a closed--loop orient, solid
tapping operation, or any other operation that requires closed--loop
spindle operation.
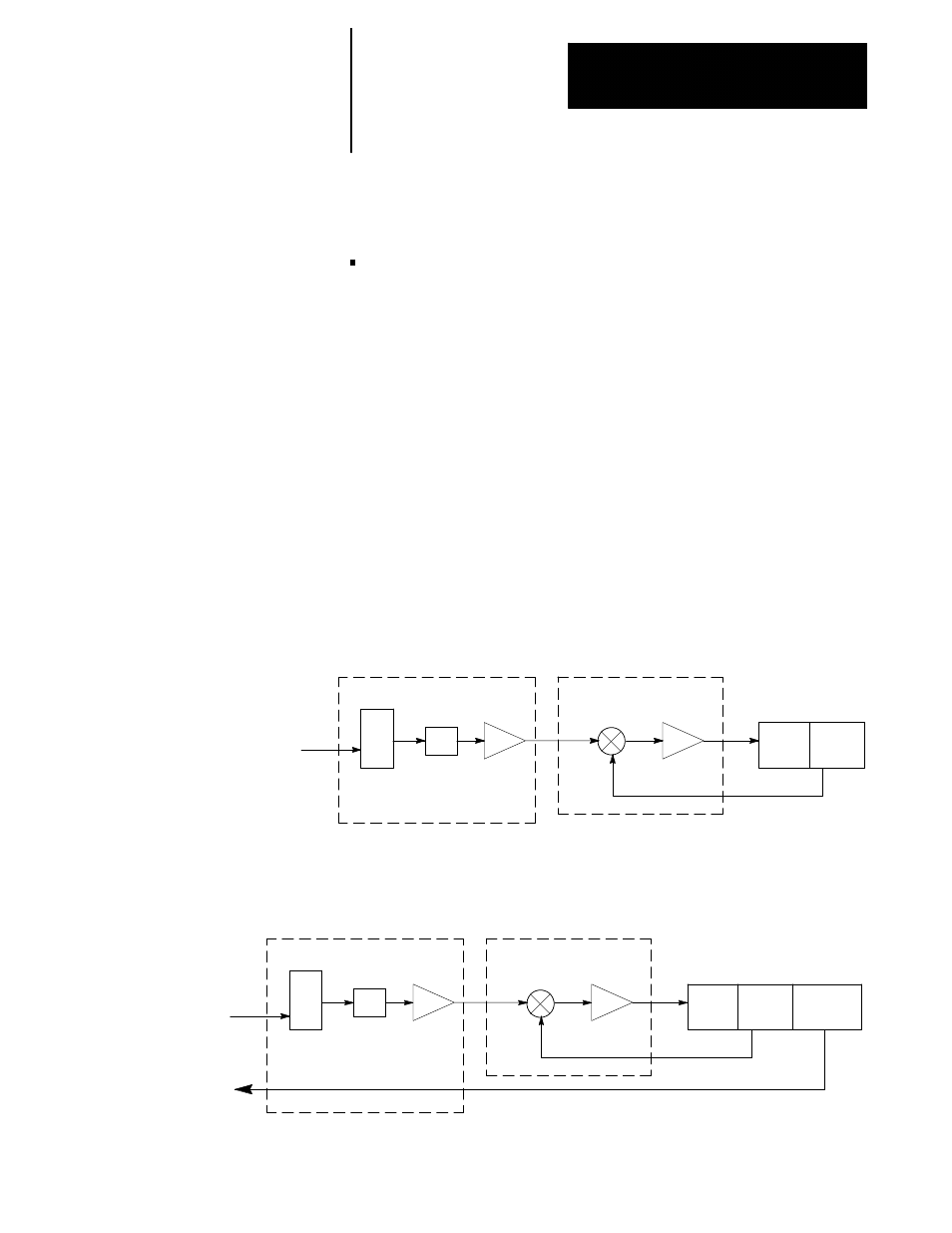
Figure 7.14
Open--loop Block Diagram (no position feedback)
Analog Servo Interface
Analog Drive
Velocity
command
Amplifier
Scaling
and
ramping
Digital to
analog
converter
Velocity
comparison
Amplifier
Motor Tacho--
meter
Velocity feedback
+
--
Figure 7.15
Open--loop with Position Feedback Block Diagram
Analog Servo Interface
Analog Drive
Motor Tacho--
meter
Encoder
Velocity feedback
Position feedback
Amplifier
Amplifier
Velocity
Comparison
Scaling
and
ramping
Digital to
analog
converter
Velocity
command
Actual
position
+
--
7.2.1
Servo Position Loop Type