Rockwell Automation 8520-ARM2 9/Series CNC AMP Reference Manual Documentation Set User Manual
Page 163
Servo Parameters
Chapter 7
7-17
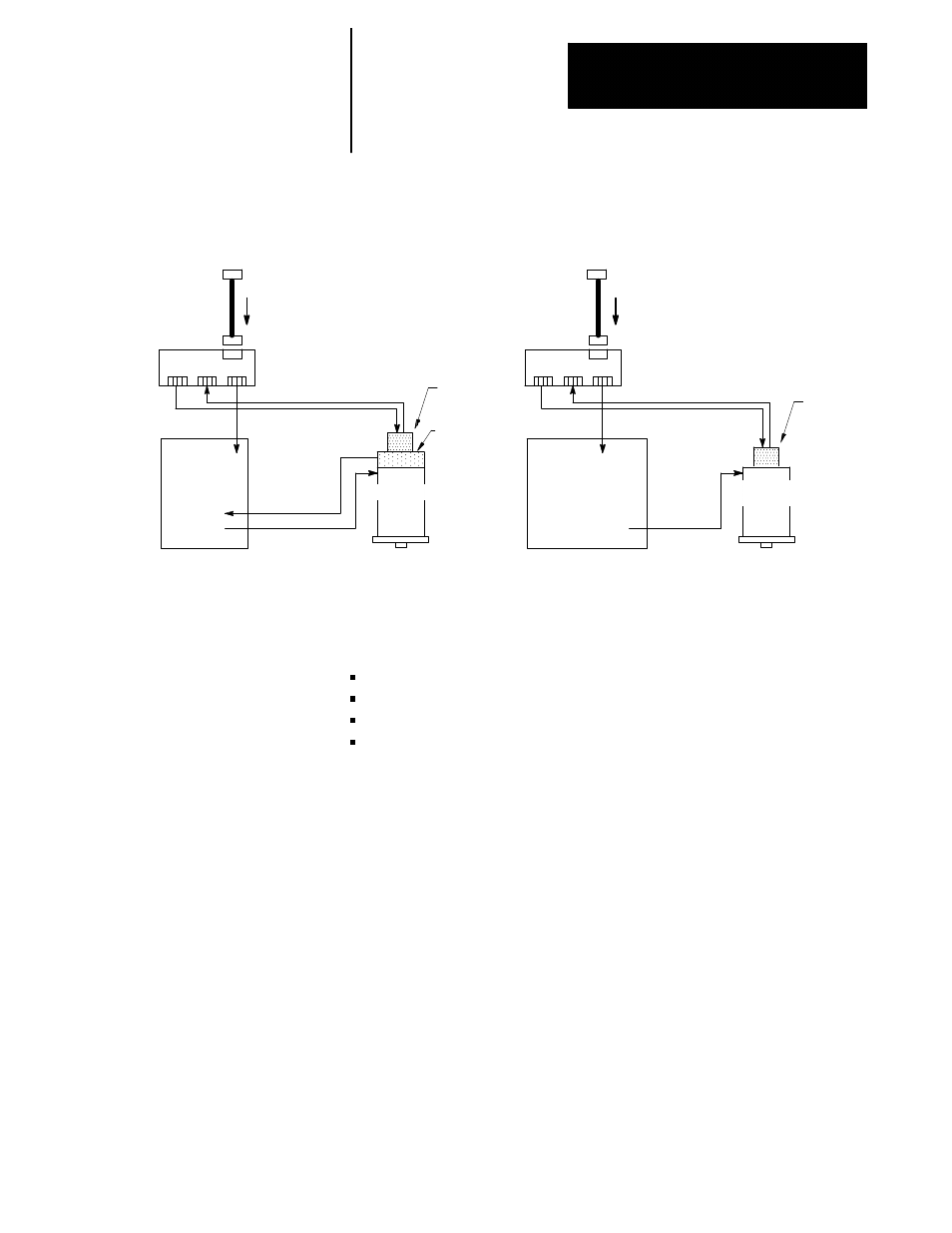
Figure 7.6
Tachometer vs. Tachless Velocity Loop
Position feedback
Encoder power
Velocity
Feedback
Servo
Amplifier
External Hardware Tach Loop
Servo Loop Type = (b) Position (Analog with Tach)
Tachless Software Velocity Loop
Servo Loop Type = (b) Position/Velocity (Tachless)
Servo Connection on Control
Term Panel
Encoder
Tachometer
(also used for velocity loop)
Encoder power
Servo
Amplifier
Servomotor
Term Panel
Encoder
Position feedback
Servo Connection on Control
Servomotor
(set as Torque Mode)
Position Command
Torque Command
Important: When a tachless analog systems detects an E-stop condition,
the control sets the torque output command to zero. You need to reduce the
motor speed to zero in a safe manner. This can be done through one of
these methods:
Torque Amplifier Dynamic Braking
Resistor Type Dynamic Braking
Setting a Motor Brake
User-defined braking
The customer-supplied torque-block amplifier is responsible for both short
and long term thermal protection of the amplifier and motor.
The torque command is limited at
±
10 volts. You need to scale the peak
motor current to this limit.
The parameter ACC/DEC RAMP may need to be set to control the speed
torque envelope.
This block diagram illustrates tachless operation when the control is in
ZFE (zero following error) mode.