Rockwell Automation 8520-ARM2 9/Series CNC AMP Reference Manual Documentation Set User Manual
Page 172
Servo Parameters
Chapter 7
7-26
Closed Loop
Use this for any axis that returns position feedback to the control for use
in closing the position loop. The axis must be equipped with a position
feedback device (e.g., encoder).
In closed loop, the velocity command sent to the servo drive is
proportional to the following error. Following error is the difference
between the commanded and the actual axis position. Refer to
Figure 7.16.
Important: A closed--loop axis requires homing. Refer to the homing
parameters of chapter 5.
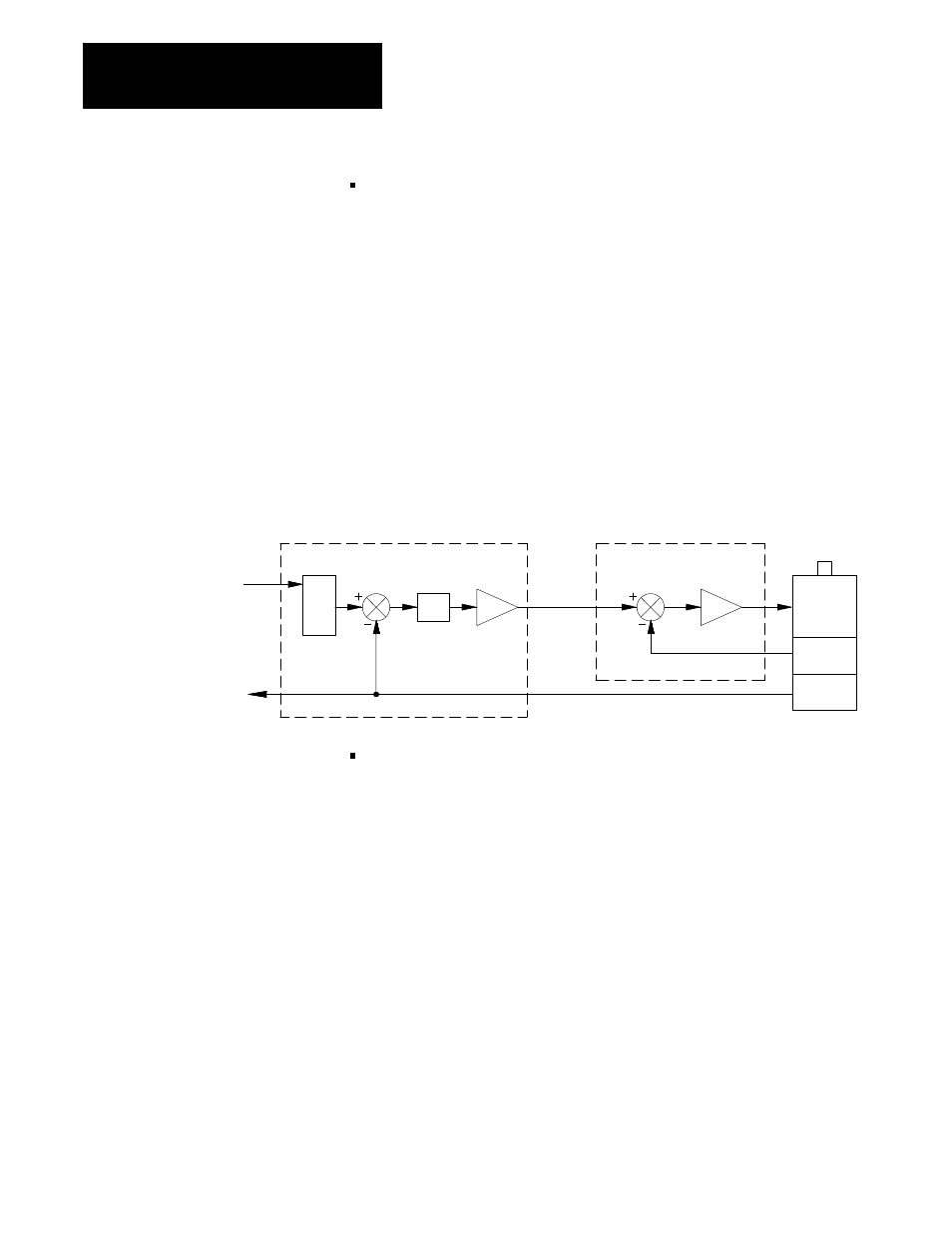
Figure 7.16
Closed--loop Block Diagram
Analog Servo Interface
Analog Drive
Position
command
Position
feedback
Fine
interpo-
lation
Position
comparison
Digital to
analog
converter
Amplifier
Amplifier
Velocity
comparison
Position feedback
Motor
Encoder
Tacho-
meter
Velocity feedback
DAC
out-
put
ZFE Closed Loop
Use this for any axis that returns position feedback to the control for use
in closing the position loop. The axis must be equipped with a position
feedback device (encoder).
ZFE stands for Zero Following Error. Following error is the difference
between the commanded position and the actual axis position, and zero
following error refers to the control’s ability to minimize that difference
after reaching the commanded feedrate.
This is accomplished by allowing a percentage of the velocity command
from fine interpolation to be summed with the following error to
produce the velocity signal that is ultimately sent to the drives. This is
referred to as velocity feed-forward. Refer to Figure 7.17.