Rockwell Automation 8520-ARM2 9/Series CNC AMP Reference Manual Documentation Set User Manual
Page 217
Servo Parameters
Chapter 7
7-71
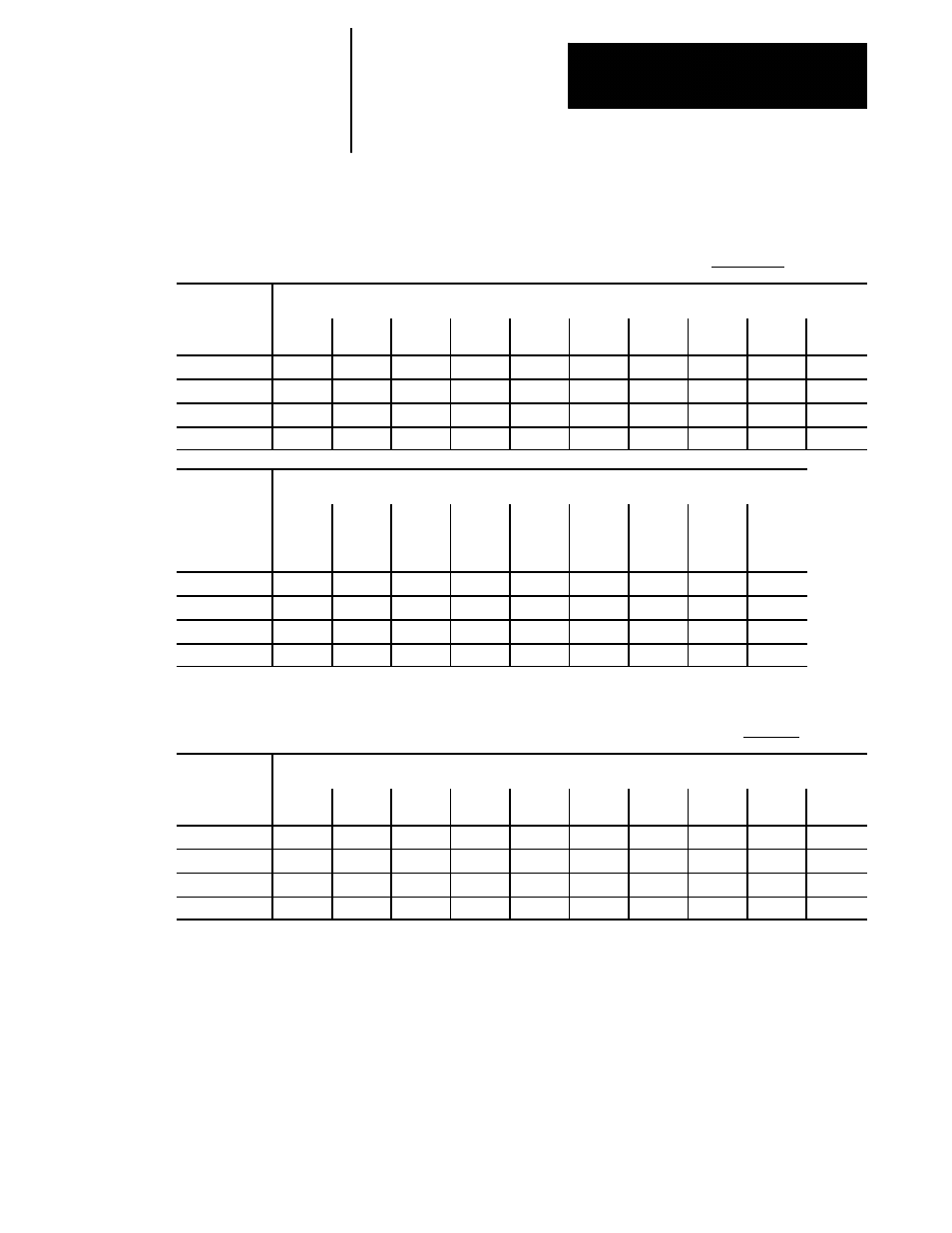
The following tables are provided for reference only.
Table 7.B
Velocity Proportional Gain Values for Standard Motors with Incremental Feedback
MOTOR:LOAD
INERTIA
8500 MOTOR TYPES
RATIO
8500
A1C
8500
A2C
8500
B1C
8500
B2C
8500
B3C
8500
A1D
8500
A2D
8500
A3D
8500
B1D
8500
B2D
1 : 0
17408
15872
20480
20480
20480
17408
16384
16128
20480
20480
1 : 1
34816
31744
40960
40960
40960
34816
32768
32256
40960
40960
1 : 2
52224
47616
53248
53248
64512
52224
49152
48384
53248
53248
1 : 3
64512
64512
64512
64512
64512
64512
64512
64512
64512
64512
MOTOR:LOAD
INERTIA
1326 MOTOR TYPES
RATIO
1326AB
B410G
B410J
1326AB
B420E
B420H
1326AB
B430E
B430G
B740E
1326AB
B515E
B515G
1326AB
B520E
1326AB
B520F
1326AB
B530E
1326AB
B720E
1326AB
B730E
1 : 0
1000
2000
3000
7500
8738
6000
10000
3600
22000
1 : 1
2000
4000
6000
15000
17460
12000
20000
7200
44000
1 : 2
3000
6000
9000
22500
26214
18000
30000
10800
66000
1 : 3
4000
8000
12000
30000
34952
24000
40000
14400
88000
Table 7.C
Velocity Proportional Gain Values for Standard 8500 Motors with Absolute Encoders
MOTOR:LOAD
INERTIA
8500 MOTOR TYPES
RATIO
8500
A1C
8500
A2C
8500
B1C
8500
B2C
8500
B3C
8500
A1D
8500
A2D
8500
A3D
8500
B1D
8500
B2D
1 : 0
12750
11625
15000
15000
15000
12750
12000
11813
15000
15000
1 : 1
25500
23250
30000
30000
30000
25500
24000
23625
30000
30000
1 : 2
38250
34875
39000
39000
47250
38250
36000
35438
39000
39000
1 : 3
47250
47250
47250
47250
47250
47250
47250
47250
47250
47250
Generally, if set too high, the axis is underdampened and oscillation
results. If set too low, the axis is overdampened and requires too much
time to reach position.