Notes – Yaskawa MotionWorks IEC Toolboxes User Manual
Page 92
Cam Toolbox: Function Blocks
MotionWorks IEC61131-3 Toolboxes: 2013-09-13
79
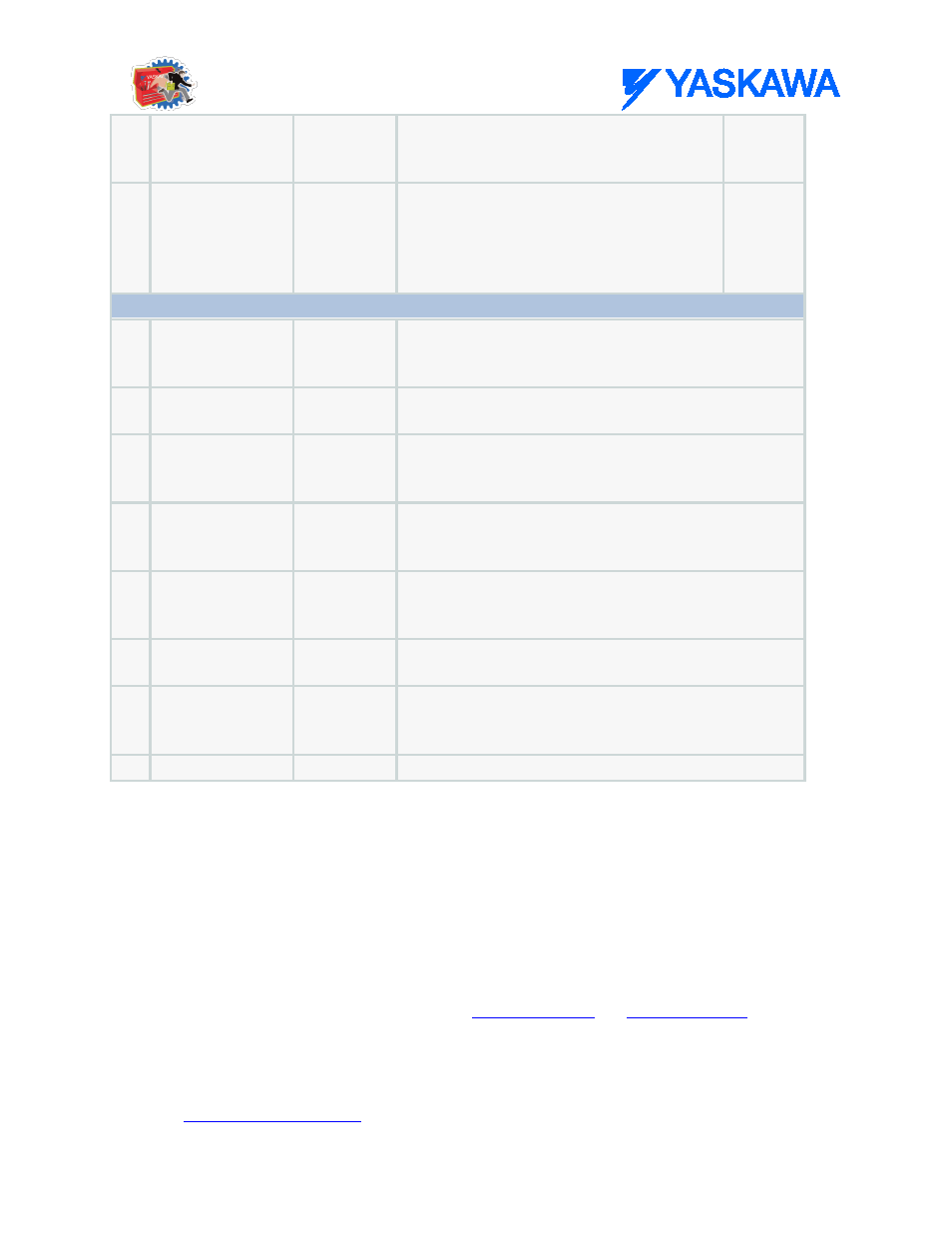
prepare to switch to the RampOut cam profile
at the SwitchOver position specified in the
BlendData structure.
V
ExecuteStandStill
BOOL
Upon the rising edge, this function block will
prepare to engage the slave to the Running
cam profile at the StandstillEngage position
(calculated after an E-Stop recovery routine)
in the BlendData structure
FALSE
VAR_OUTPUT
E
InSync
BOOL
Set high when the slave first synchronizes with the master
(Running cam profile is synchronized). This output is reset
when execute goes low.
B
Busy
BOOL
Set high upon the rising edge of the 'Execute' or 'Enable'
input, and reset if Done, CommandAborted, or Error is true.
B
Active
BOOL
For buffered modes, this output is set high at the moment
the block takes control of the axis. For non buffered modes,
the outputs Busy and Active have the same value.
B
CommandAborted
BOOL
Set high if motion is aborted by another motion command
or MC_Stop. This output is cleared with the same behavior
as the Done output.
B
Error
BOOL
Set high if error has occurred during the execution of the
function block. This output is cleared when 'Execute' or
'Enable' goes low.
B
ErrorID
UINT
If Error is true, this output provides the Error ID. This
output is reset when 'Execute' or 'Enable' goes low.
V
BlendStatus
UINT
Outputs a value of 1 to indicate the RampIn Cam is
operating, 2 indicates the Running cam is operating, and 3
indicates the RampOut cam is operating.
E
EndOfProfile
BOOL
Pulsed output signaling the cyclic end of a CAM Profile
Notes
•
Typically the RampInSwitchOverPos and the RampOutSwitchOverPos will be fixed at some
predetermined position that is suitable for the application. Typically the RampInSwitchOverPos will
occur very late in the cycle, and the RampOutSwitchOverPos will occur very early in the cycle. This will
provide for the optimum motion performance by allowing as much time as possible for the slave to
accelerate up to the master speed.
•
If using the ExecuteStandStill mode, use the
and
blocks to determine the master position that corresponds to the current slave position, and set
BlendData.StandStillEngagePos accordingly to preserve synchronization. The ExecuteStandStill mode
was added to provide the capability of re-synchronizing after an E-Stop.
See the
on Yaskawa's YouTube Channel.