Pidcontrol, Parameters – Yaskawa MotionWorks IEC Toolboxes User Manual
Page 556
Yaskawa Toolbox: Function Blocks
MotionWorks IEC61131-3 Toolboxes: 2013-09-13
543
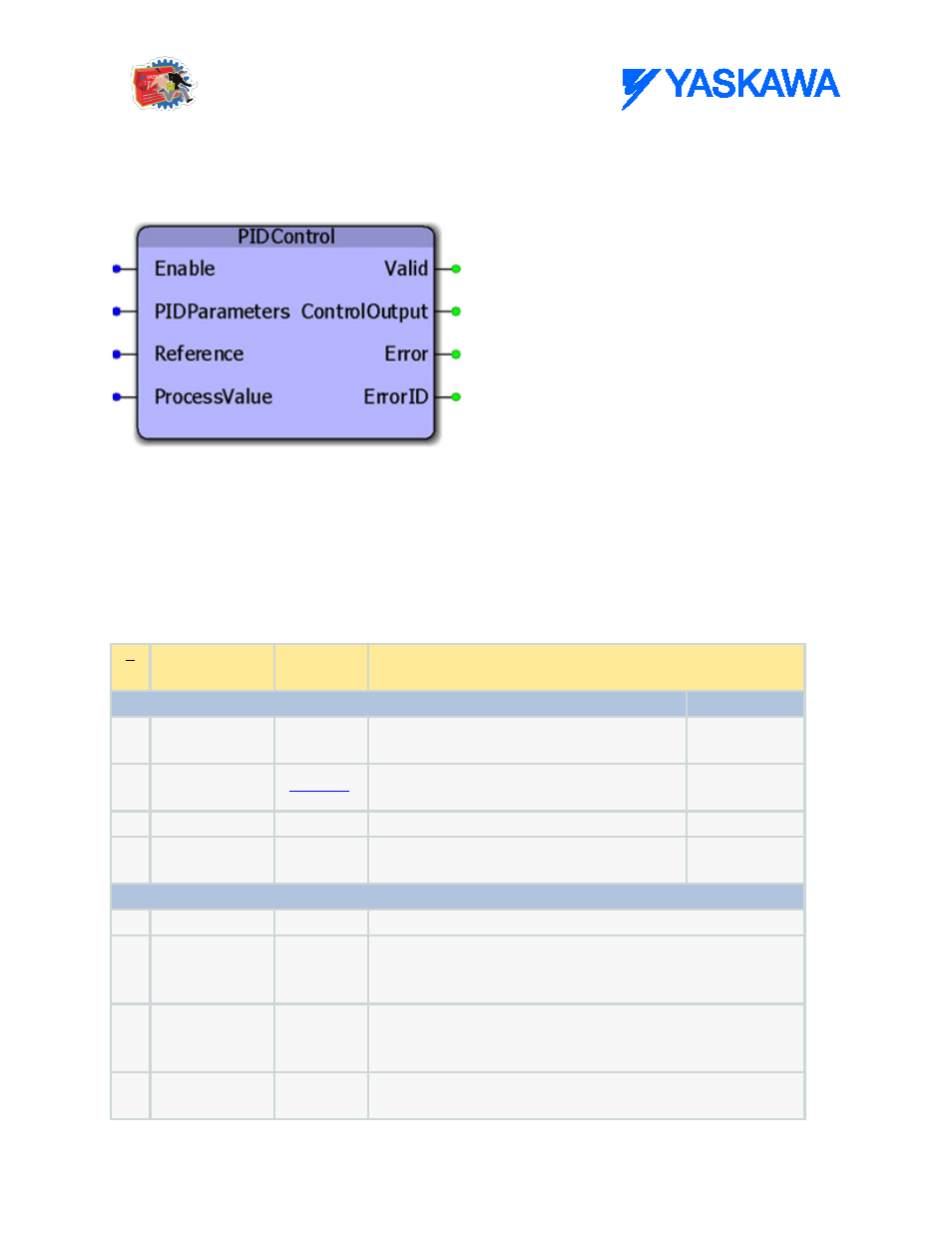
PIDControl
This function block can be used as a generic control loop feedback mechanism. A PID controller calculates an
"error" value as the difference between a measured process variable and a desired set point, or reference.
PIDParameters must be adjusted to allow the process to provide the proper ControlOutput for a given error
situation.
Parameters
*
Parameter
Data
Type
Description
VAR_INPUT
Default
B
Enable
BOOL
The function will continue to execute while
enable is held high.
FALSE
V
PIDParameters
Structure containing all the information for
PID control block to operate
N/A
V
Reference
LREAL
Setpoint for the PID control loop.
LREAL#0.0
V
ProcessValue
LREAL
Real world value to be compared with the
Reference in the control loop
LREAL#0.0
VAR_OUTPUT
B
Valid
BOOL
Indicates that the outputs of the function are valid.
V
ControlOutput
BOOL
Output value from the PID control block. The range of values
will be governed by the PIDParameters, especially the upper
and lower limit.
B
Error
BOOL
Set high if error has occurred during the execution of the
function block. This output is cleared when 'Execute' or 'Enable'
goes low.
B
ErrorID
UINT
If Error is true, this output provides the Error ID. This output is
reset when 'Execute' or 'Enable' goes low.