Yaskawa MotionWorks IEC Toolboxes User Manual
Page 439
PLCopen Toolbox: Function Blocks
MotionWorks IEC61131-3 Toolboxes: 2013-09-13
426
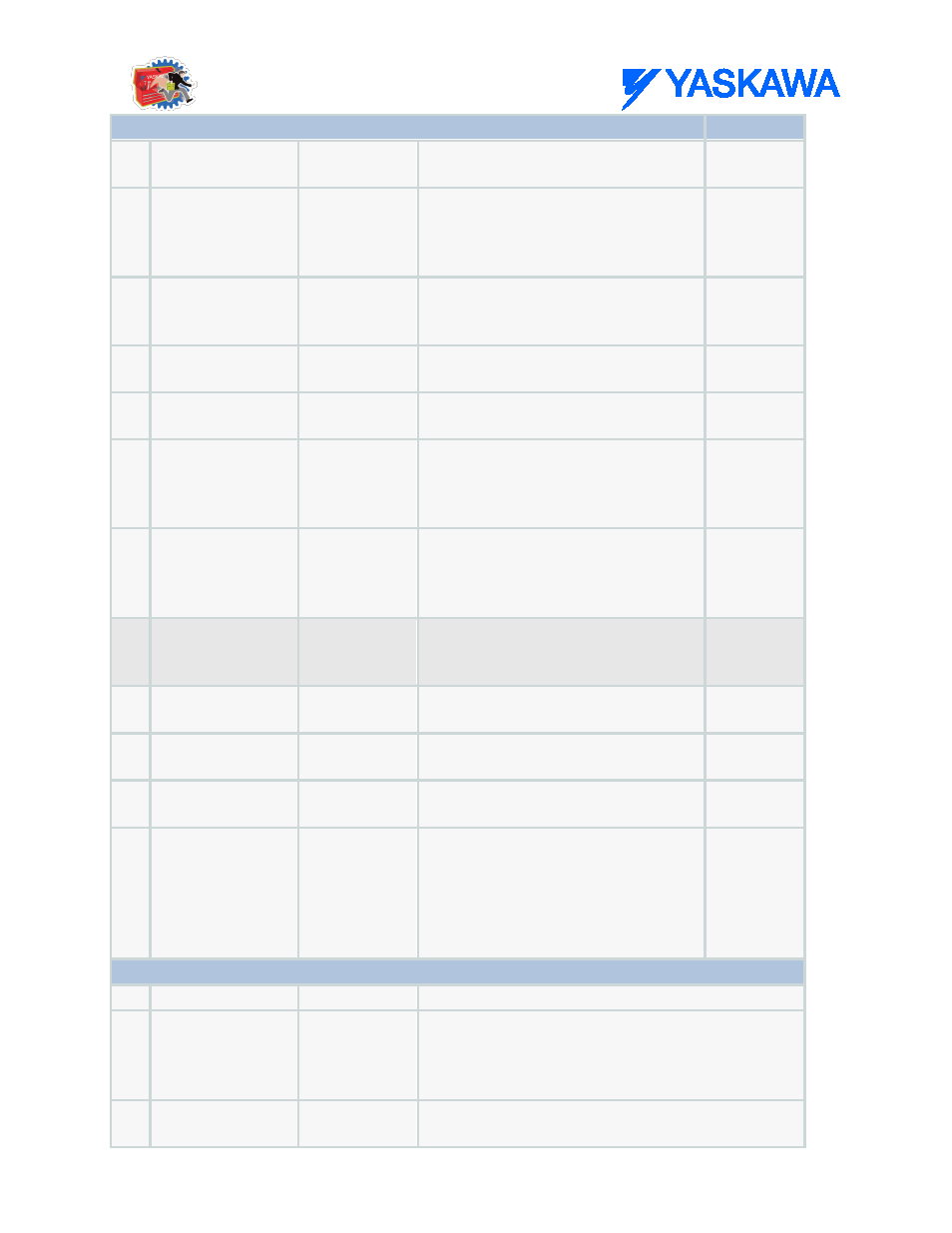
VAR_INPUT
Default
B
Enable
BOOL
The function will continue to execute
while enable is held high.
FALSE
B
Execute
BOOL
Upon the rising edge, all other function
block inputs are read and the function is
initiated. To modify an input, change the
value and re-trigger the execute input.
FALSE
V
DefaultDistance
LREAL
The default product length. This is the
distance the axis will travel if a
registration mark is not detected.
LREAL#0.0
V
DistanceAfterLatch
LREAL
The desired additional travel distance
after the registration mark is detected
LREAL#0.0
B
Velocity
LREAL
Absolute value of the velocity in user
units/second
LREAL#0.0
B
Acceleration
LREAL
Value of the acceleration in user
units/second^2 (acceleration is
applicable with same sign of torque and
velocity)
LREAL#0.0
B
Deceleration
LREAL
Value of the deceleration in user
units/second^2 (deceleration is
applicable with opposite signs of torque
and velocity)
LREAL#0.0
E
Jerk
LREAL
Not supported; reserved for future use.
Value of the jerk in [user units /
second^3].
V
MaxCorrection
LREAL
Limits the amount of correction that can
be applied
LREAL#0.0
V
SensorMinimum
LREAL
The earliest slave position where a
sensor position is valid for correction.
LREAL#0.0
V
SensorMaximum
LREAL
The latest slave position where a sensor
position is valid for correction.
LREAL#0.0
V
MissedLatchLimit
UINT
The number of consecutive product
lengths that can occur without seeing a
mark in the window. Valid sensor
detections will reset the internal
counter. The next valid sensor detection
will reset the internal counter.
UINT#0
VAR_OUTPUT
B
Valid
BOOL
Indicates that the outputs of the function are valid.
B
Done
BOOL
Set high when the commanded action has been
completed successfully. If another block takes control
before the action is completed, the Done output will not
be set. This output is reset when execute goes low.
B
Busy
BOOL
Set high upon the rising edge of the 'Execute' or 'Enable'
input, and reset if Done, CommandAborted, or Error is