Notes, Error description – Yaskawa MotionWorks IEC Toolboxes User Manual
Page 460
PLCopen Toolbox: Function Blocks
MotionWorks IEC61131-3 Toolboxes: 2013-09-13
447
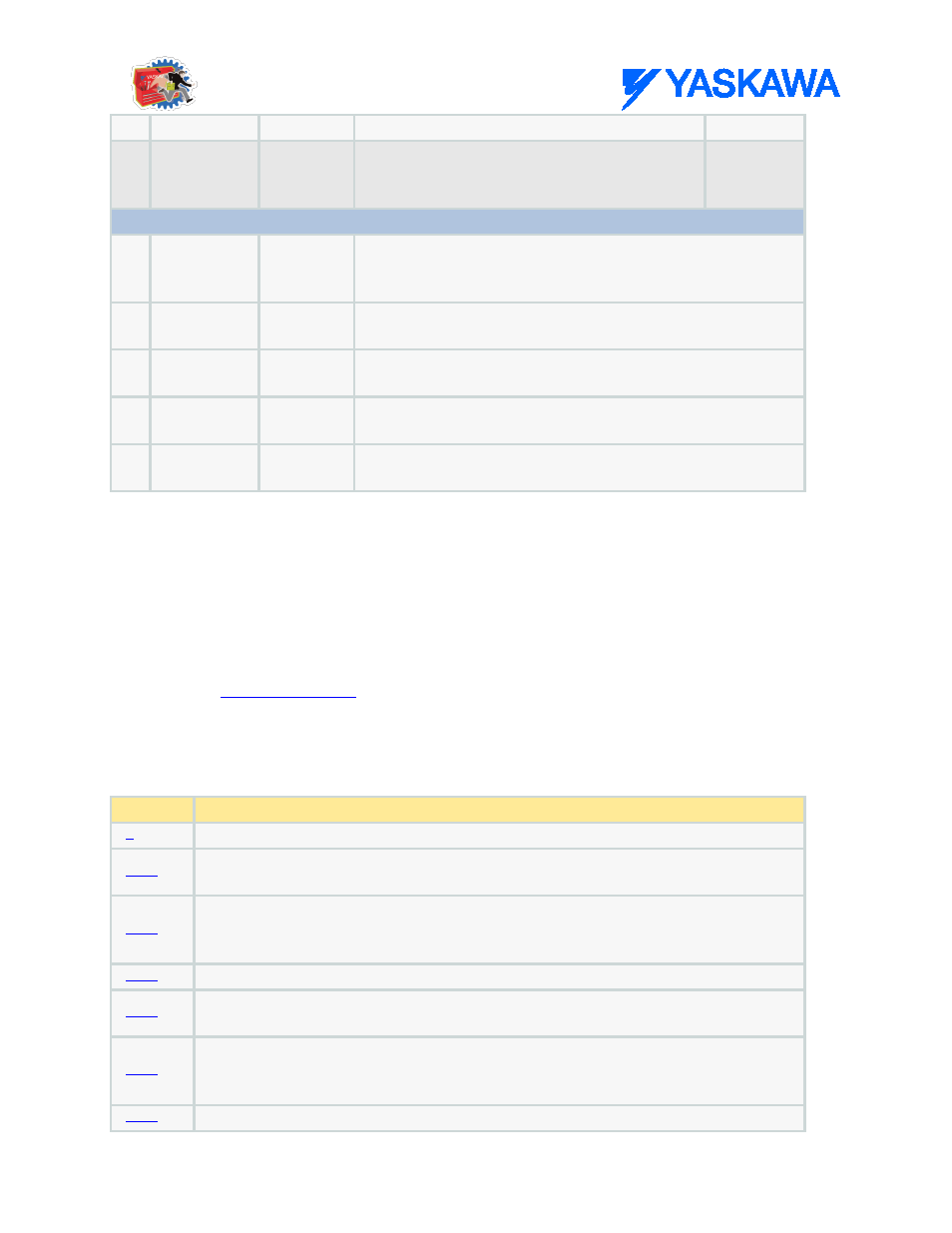
torque and velocity)
B
Jerk
LREAL
Not supported; reserved for future use. Use S-
Curve parameters 1300 and 1301. Value of the
jerk in [user units / second^3].
LREAL#0.0
VAR_OUTPUT
B
InVelocity
BOOL
Set high when the axis first reaches the specified velocity
(function is complete). This output is reset when execute goes
low.
B
Done
BOOL
Turns on for one scan when the axis comes to a stop after both
Forward and Reverse inputs go FALSE.
B
Busy
BOOL
Set high upon the rising edge of the 'Execute' or 'Enable' input,
and reset if Done, CommandAborted, or Error is true.
B
Error
BOOL
Set high if error has occurred during the execution of the function
block. This output is cleared when 'Execute' or 'Enable' goes low.
B
ErrorID
UINT
If Error is true, this output provides the Error ID. This output is
reset when 'Execute' or 'Enable' goes low.
Notes
•
The velocity can be changed on the fly without toggling the Forward or Reverse input. The code inside
this function block will detect if the velocity has changed, and automatically re trigger the
MC_MoveVelocity function block inside. Starting in PLCopen Toolbox v202, changes in Acceleration and
Deceleration are detected and can be changed on the fly.
•
See the
on Yaskawa's YouTube channel.
Error Description
ErrorID
Meaning
No error
The move could not be buffered because the axis motion queue is full. 16 moves is the
maximum which can be buffered.
The move could not be started because motion is prohibited. The drive may not be enabled.
MC_Power.Enable_Positive or MC_Power.Enable_Negative might be low. Check
MC_Power.Status output. MC_Stop.Execute might be held high, preventing motion.
The function block is not applicable for the external axis specified
Motion aborted due to axis alarm. It is also possible that a software limit has been
exceeded.
Axis ID does not correspond to an axis configured on the system. Verify the value of
AxisNum matches a logical axis number in the configuration. Tip: Make sure AXIS_REF is
properly declared as a VAR or VAR_GLOBAL in all relevant POUs.
Buffer mode does not correspond to a valid enumeration value.