Yaskawa MotionWorks IEC Toolboxes User Manual
Page 242
Gantry Toolbox
MotionWorks IEC61131-3 Toolboxes: 2013-09-13
229
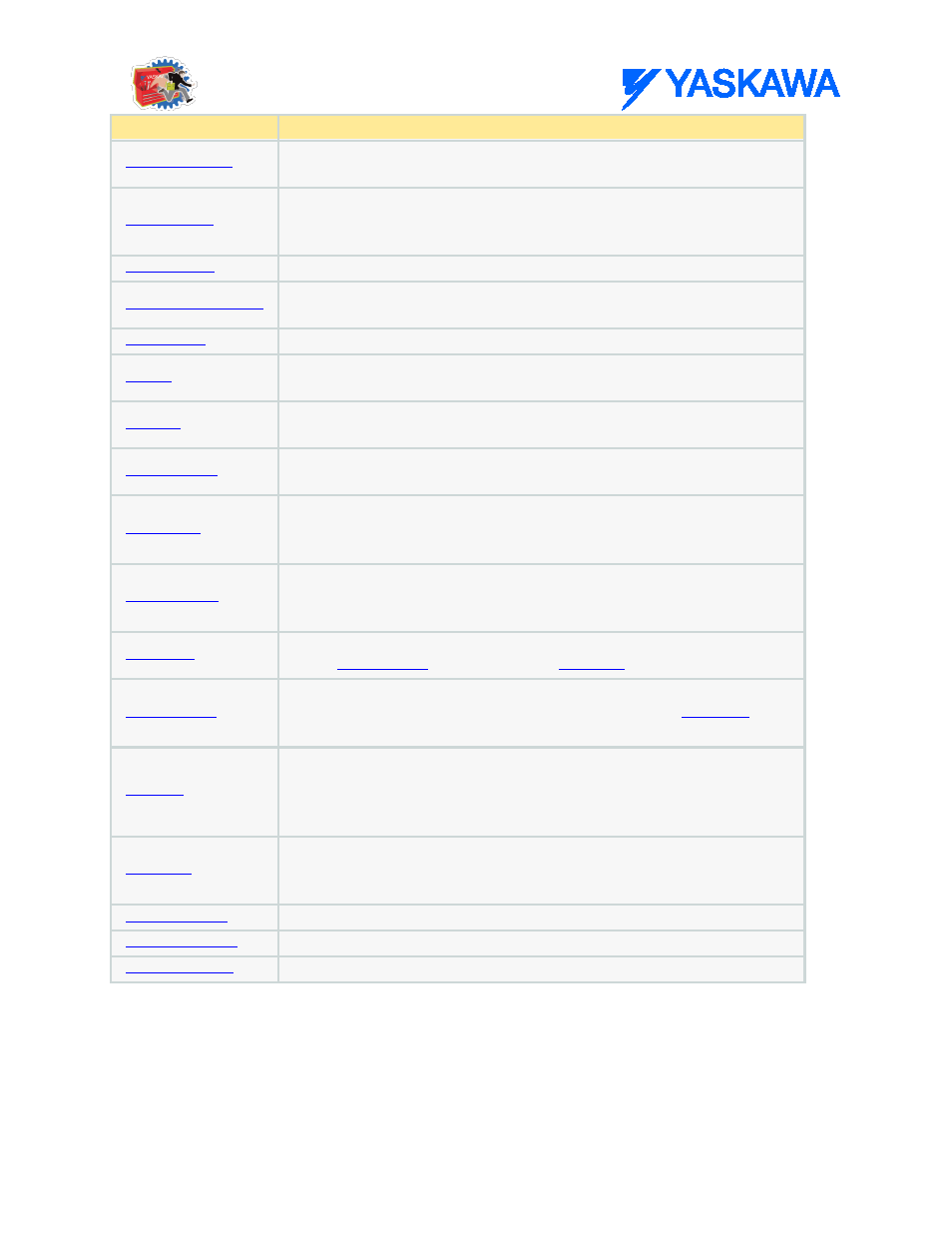
Function Block
Description
Calculates start and traversed angles for arcs (used as an input to
PathGenerator function block)
Moves all gantry axes in search of home by first seeking one of the limit
switches, and then searching in the other direction for the C channel or index
pulse.
Enables or disable all axes configured as part of a gantry system.
Moves all gantry axes back to the home position as defined by the home
positions in the GantryStruct.
Executes the MC_Stop block for all axes configured as part of a gantry system.
Performs an absolute move the X and Y axes to a specific location within the
gantry coordinate system.
Performs an absolute move the X,Y, and Z axes to a specific location within
the gantry coordinate system.
Operates a simple gripper device if the actuator can be controlled via a digital
output.
Calculates the required acceleration, deceleration, and velocity for both X and
Y axes so that straight line motion can occur between any two points in the XY
(two dimensional) coordinate system.
Calculates the required acceleration, deceleration, and velocity for X, Y and Z
axes so that straight line motion can occur between any two points in three
dimensional space within the gantry coordinate system.
This function block moves X and Y axes according to a path profile generated
by the
This function block converts straight line vector and arc segment data into
cam files, which will provide coordinated motion by using the
function block
Initiates a series of actions that involves moving the XY axes to a specific
location, opening a gripper actuator, moving the Z axis to a "Down" location,
closing the gripper (to pick a part), and then finally moving the Z axis back to
its "Up" position.
Initiates a series of actions that involves moving the XY axes to a specific
location, moving the Z axis to a "Down" location, opening the gripper (to
place the part), and then finally moving the Z axis back to its "Up" position.
Used to show active segment and output flags status
Used to create absolute motion for an XY gantry system
Used to create relative motion for an XY gantry system