Notes, Error description – Yaskawa MotionWorks IEC Toolboxes User Manual
Page 463
PLCopen Toolbox: Function Blocks
MotionWorks IEC61131-3 Toolboxes: 2013-09-13
450
with same sign of torque and velocity)
B
Deceleration
LREAL
Value of the deceleration in user
units/second^2 (deceleration is applicable
with opposite signs of torque and velocity)
LREAL#0.0
E
Jerk
LREAL
Not supported; reserved for future use. Use
S-Curve parameters 1300 and 1301. Value of
the jerk in [user units / second^3].
LREAL#0.0
V
StopPosition
LREAL
Once the Forward and Reverse inputs are
false, the axis will decelerate to a stop at the
specified StopPosition using the specified
deceleration rate
LREAL#0.0
VAR_OUTPUT
B
InVelocity
BOOL
Set high when the axis first reaches the specified velocity
(function is complete). This output is reset when execute
goes low.
B
Done
BOOL
Turns on for one scan when the axis comes to a stop after
both Forward and Reverse inputs go FALSE.
B
Busy
BOOL
Set high upon the rising edge of the 'Execute' or 'Enable'
input, and reset if Done, CommandAborted, or Error is true.
B
CommandAborted
BOOL
Set high if motion is aborted by another motion command or
MC_Stop. This output is cleared with the same behavior as
the Done output.
B
Error
BOOL
Set high if error has occurred during the execution of the
function block. This output is cleared when 'Execute' or
'Enable' goes low.
E
ErrorID
UINT
If Error is true, this output provides the Error ID. This output
is reset when 'Execute' or 'Enable' goes low.
Notes
The velocity, acceleration, and deceleration can be changed on the fly without toggling the Forward or Reverse
input. The code inside this function block will detect if the input values have changed, and automatically re
trigger the MC_MoveVelocity function block inside. Starting in PLCopen Toolbox v202, changes in Acceleration
and Deceleration are detected and can be changed on the fly.
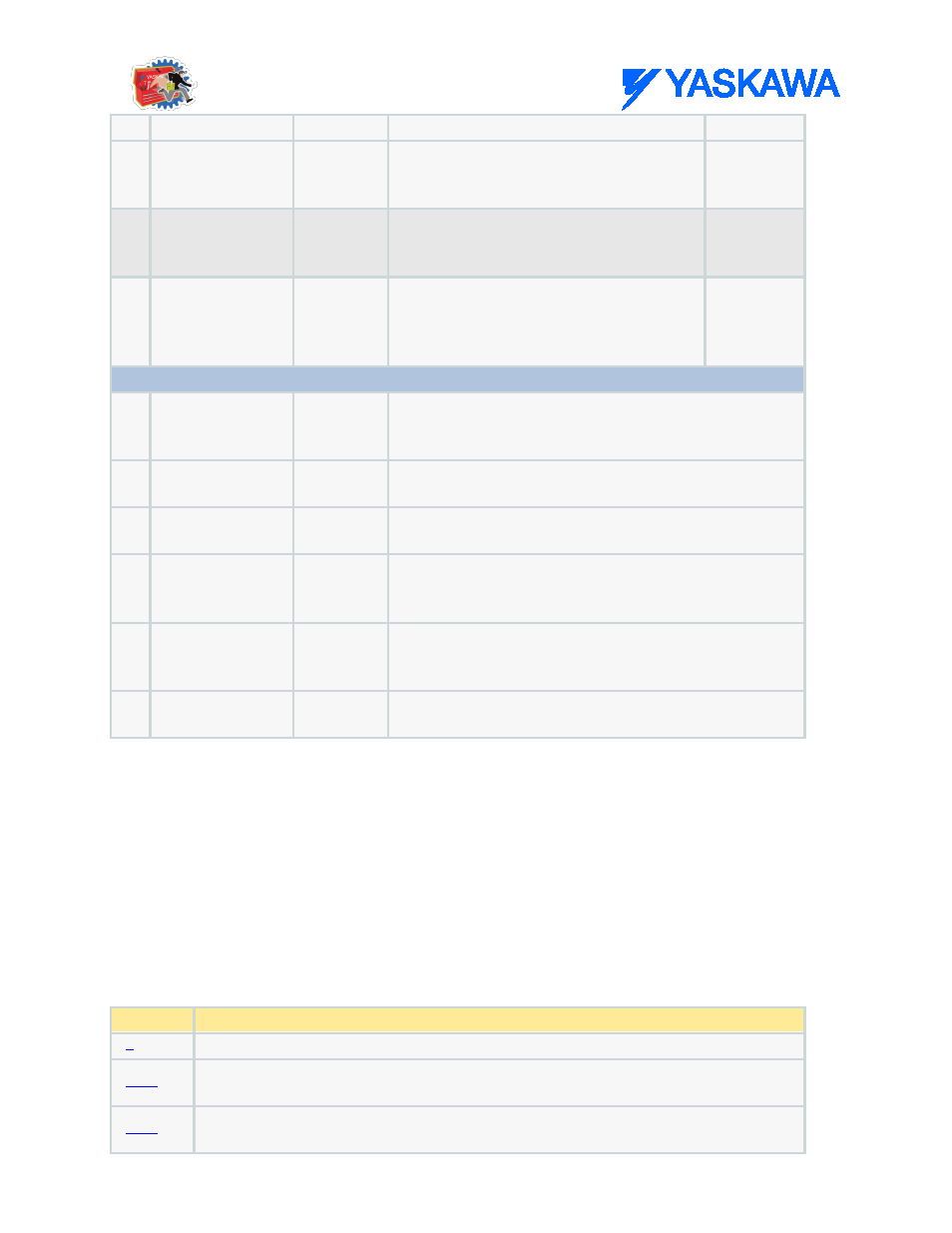
Error Description
ErrorID
Meaning
No error
The move could not be buffered because the axis motion queue is full. 16 moves is the
maximum which can be buffered.
The move could not be started because motion is prohibited. The drive may not be enabled.
MC_Power.Enable_Positive or MC_Power.Enable_Negative might be low. Check