Error description – Yaskawa MotionWorks IEC Toolboxes User Manual
Page 451
PLCopen Toolbox: Function Blocks
MotionWorks IEC61131-3 Toolboxes: 2013-09-13
438
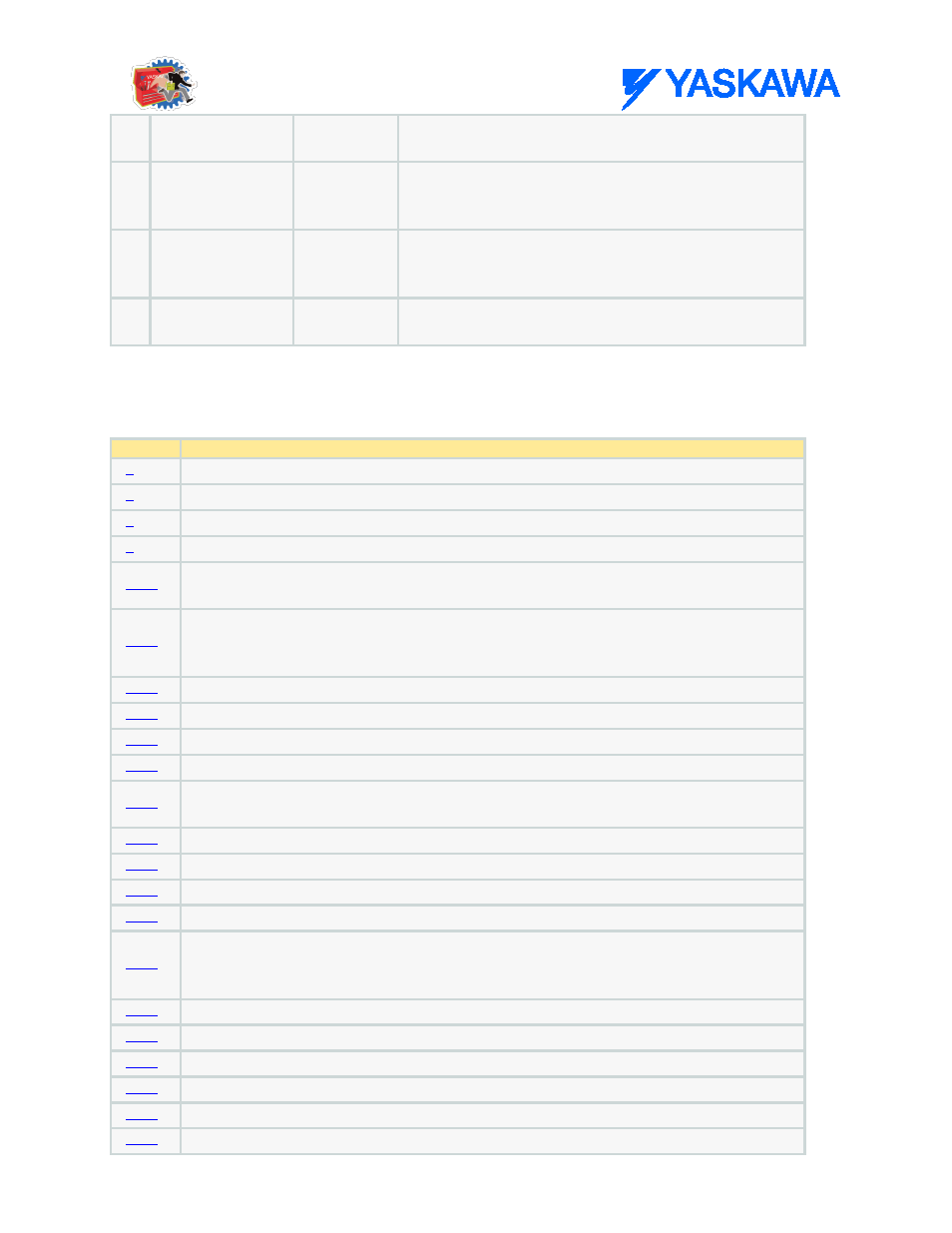
action is completed, the Done output will not be set. This
output is reset when execute goes low.
B
CommandAborted
BOOL
Set high if motion is aborted by another motion command
or MC_Stop. This output is cleared with the same behavior
as the Done output.
B
Error
BOOL
Set high if error has occurred during the execution of the
function block. This output is cleared when 'Execute' or
'Enable' goes low.
E
ErrorID
UINT
If Error is true, this output provides the Error ID. This
output is reset when 'Execute' or 'Enable' goes low.
Error Description
ErrorID
Meaning
No error
Time limit exceeded
Distance limit exceeded
Torque limit exceeded
The move could not be buffered because the axis motion queue is full. 16 moves is the
maximum which can be buffered.
The move could not be started because motion is prohibited. The drive may not be enabled.
MC_Power.Enable_Positive or MC_Power.Enable_Negative might be low. Check
MC_Power.Status output. MC_Stop.Execute might be held high, preventing motion.
The function block is not applicable for the external axis specified
A homing sequence is already in progress.
MC_SetPosition can not be executed while the axis is moving.
Motion aborted due to axis alarm. It is also possible that a software limit has been exceeded.
When the axis is in rotary mode, and the MC_SetPosition tries to set a position that is equal
to or greater than the MachineCycle, this error is generated, and the position is not set.
Axis must be commanded at standstill when homing is attempted.
Position cannot be defined while the axis is the cam master of other axes.
Axis latch function already in use.
Over travel limit still ON after attempting to move away from it.
Axis ID does not correspond to an axis configured on the system. Verify the value of AxisNum
matches a logical axis number in the configuration. Tip: Make sure AXIS_REF is properly
declared as a VAR or VAR_GLOBAL in all relevant POUs.
Buffer mode does not correspond to a valid enumeration value.
Direction does not correspond to a valid enumeration value.
Mode does not correspond to a valid enumeration value.
Velocity parameter is less than or equal to zero.
Acceleration is less than or equal to zero.
Deceleration is less than or equal to zero.