Error description – Yaskawa MotionWorks IEC Toolboxes User Manual
Page 449
PLCopen Toolbox: Function Blocks
MotionWorks IEC61131-3 Toolboxes: 2013-09-13
436
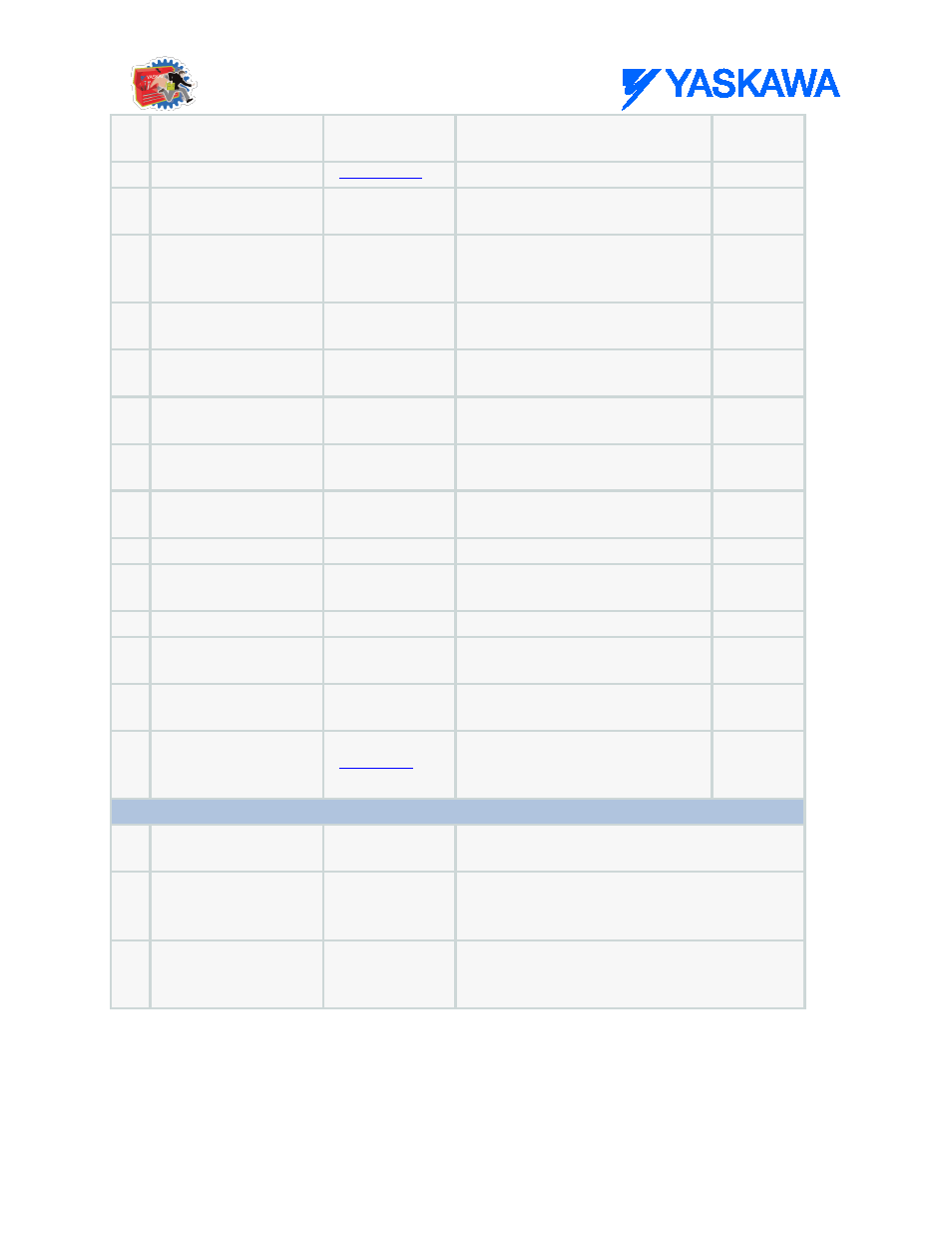
an input, change the value and re-
trigger the execute input.
B
Direction
Direction of travel for homing
B
SwitchMode
MC_SwitchMode
Edge On is the only mode
supported
B
TorqueLimit
LREAL
Torque limit while attempting
homing. In percentage of rated
torque of the servo
B
ApproachVelocity
LREAL
Velocity used to approach limit
switch or c channel
B
ApproachTimeLimit
LREAL
Time limit for the homing attempt.
In seconds
B
ApproachDistanceLimit
LREAL
Distance limit for the homing
attempt
B
AccDec
LREAL
Acceleration/deceleration for offset
moves.
B
LimitBackOffDistance
LREAL
Distance limit for back off after a
limit switch is encountered
B
CreepVelocity
LREAL
Velocity to creep to C channel
B
CreepTimeLimit
LREAL
Time limit for the creep attempt. In
seconds
B
CreepDistanceLimit
LREAL
Distance limit for the creep attempt
B
Offset
LREAL
Offset distance to move after limit
switch or C channel
B
OffsetVelocity
LREAL
Velocity of the offset move after
limit switch or C channel
B
Position
Position to be defined as the home
position
All zeros
in
structure
VAR_OUTPUT
B
Valid
BOOL
Set high if the function block is active and there
are no errors
B
Error
BOOL
Set high if error has occurred during the execution
of the function block. This output is cleared when
'Execute' or 'Enable' goes low.
E
ErrorID
UINT
If Error is true, this output provides the Error ID.
This output is reset when 'Execute' or 'Enable'
goes low.
Error Description
No Errors will be generated.