Error description – Yaskawa MotionWorks IEC Toolboxes User Manual
Page 276
Gantry Toolbox: Function Blocks
MotionWorks IEC61131-3 Toolboxes: 2013-09-13
263
V
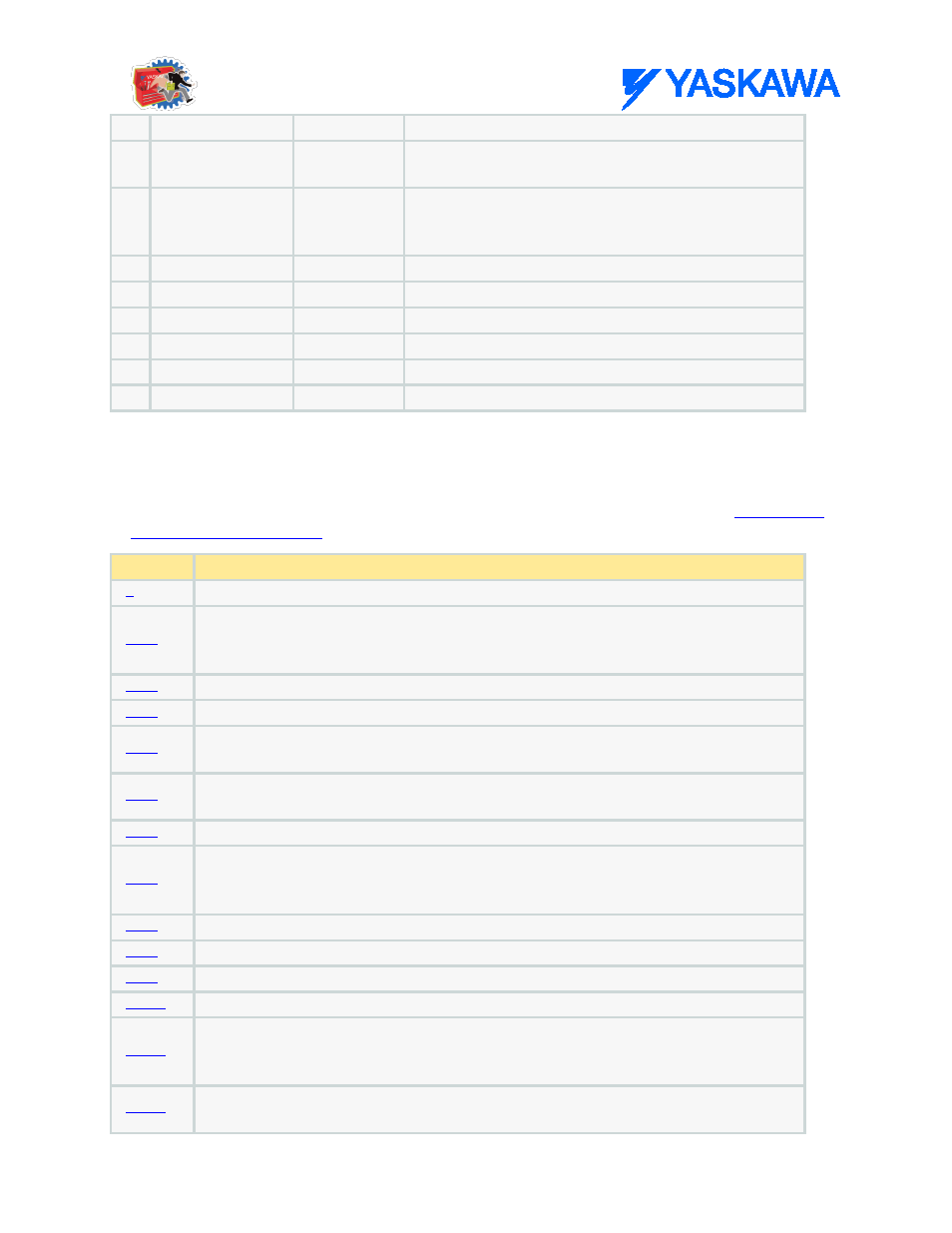
ZAxisErrorID
UINT
ErrorID on the Z axis
B
Status
BOOL
TRUE if the drive is enabled. This output is derived from
the Status output of MC_Power.
B
Error
BOOL
Set high if error has occurred during the execution of the
function block. This output is cleared when 'Execute' or
'Enable' goes low.
V
XPAxisErrorID
UINT
ErrorID on the X' axis
V
XPControlAlarmID
UINT
Controller ErrorID caused by the X' axis
V
YPAxisErrorID
UINT
ErrorID on the Y' axis
V
YPControlAlarmID
UINT
Controller ErrorID caused by the Y' axis
V
ZPAxisErrorID
UINT
ErrorID on the Z' axis
V
ZPControlAlarmID
UINT
Controller ErrorID caused by the Z' axis
Error Description
This function block uses the AxisControl function block from the PLCopen Toolbox. Refer to the
the Axis Control function block
ErrorID
Meaning
No error
The move could not be started because motion is prohibited. The drive may not be enabled.
MC_Power.Enable_Positive or MC_Power.Enable_Negative might be low. Check
MC_Power.Status output. MC_Stop.Execute might be held high, preventing motion.
The servo drive failed to enable or disable. Check the amplifier wiring for L1 / L2 / L3
The function block is not applicable for the external axis specified
Motion aborted due to axis alarm. It is also possible that a software limit has been
exceeded.
The L1 / L2 / L3 power inputs on the drive may not be supplied with power, possibly due to
an E-Stop condition.
The Safety input (HHB) is preventing the drive from enabling.
Axis ID does not correspond to an axis configured on the system. Verify the value of
AxisNum matches a logical axis number in the configuration. Tip: Make sure AXIS_REF is
properly declared as a VAR or VAR_GLOBAL in all relevant POUs.
Buffer mode does not correspond to a valid enumeration value.
The specified external axis may not be used. A physical axis is required.
The specified virtual axis may not be used with this function block.
Sending clear alarms command to servo drive failed.
The DataType connected to a function block parameter specified as ANY type does not
match the required data size. Right click on the function block and select “Object
Properties” to determine which parameters are ANY type.
An internal assertion in the motion kernel failed indicating the controller is not in a stable
state. Please report this error to Yaskawa America Incorporated.