Rockwell Automation 21G PowerFlex 750-Series AC Drives Programming Manual User Manual
Page 96
96
Rockwell Automation Publication 750-PM001J-EN-P - October 2014
Chapter 3
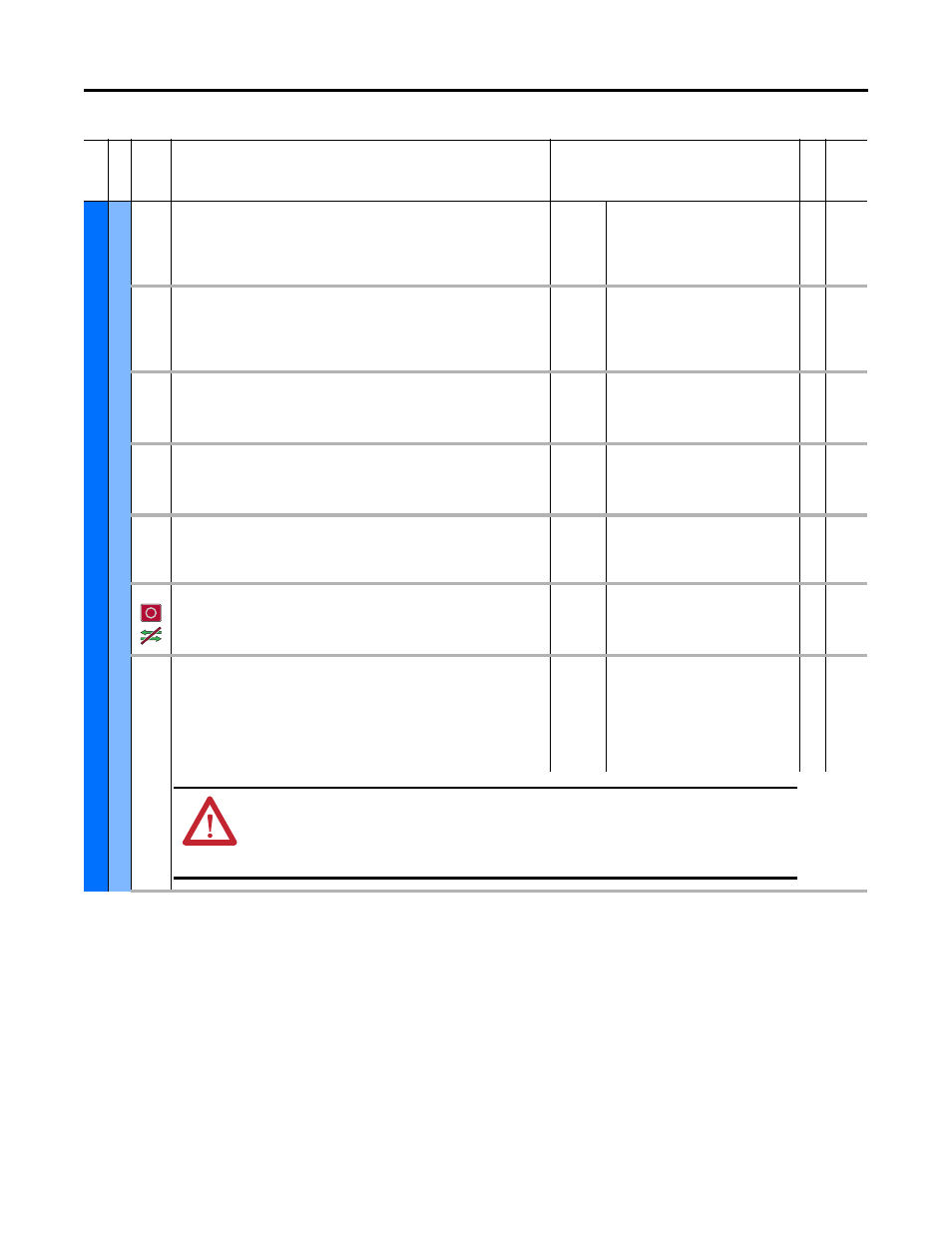
Drive Port 0 Parameters
DR
IV
E C
FG
Braking F
ea
tures
388
Flux Braking En
Flux Braking Enable
Enables/disables flux braking.
Functional in all motor control modes. Does not work with permanent magnet motors.
Flux braking is enabled during decel.
Default:
Options:
0 = “Disabled”
0 = “Disabled”
1 = “Enabled”
RW 32-bit
Integer
389
Flux Braking Lmt
Flux Braking Limit
Sets the limit on the desired motor voltage during flux braking as a percent of P25
[Motor NP Volts].
Functional in all motor control modes.
Units:
Default:
Min/Max:
%
125.00
100.00 / 250.00
RW Real
390
Flux Braking Ki
Flux Braking Integral Gain
Flux braking controller integral gain
Functional in all motor control modes.
Default:
Min/Max:
10000.0
0.0 / 1000000.0
RW Real
391
Flux Braking Kp
Flux Braking Proportional Gain
Flux braking controller proportional gain.
Functional in all motor control modes.
Units:
Default:
Min/Max:
V/A
100.0
0.0 / 1000000.0
RW Real
392
Stop Dwell Time
Stop Dwell Time
Stop dwell sets an adjustable delay time between detecting zero speed and disabling
the speed and torque regulators, when responding to a stop command.
Default:
Min/Max:
0
0 / 60
RW Real
393
DC Brake Lvl Sel
DC Brake Level Select
Sets link to source used for P394 [DC Brake Level].
Functional in all motor control modes.
Default:
Min/Max:
394
1 / 159999
RW 32-bit
Integer
394
DC Brake Level
DC Brake Level
Defines the DC brake current level injected into the motor when P370/371 [Stop Mode
n] = 3 “DC Brake.” This also sets the braking current level when 6 “Fast Stop” is selected.
The DC braking voltage used in this function is created by a PWM algorithm and may not
generate the smooth holding force needed for some applications.
Functional in all motor control modes.
Units:
Default:
Min/Max:
Amps
[Rated Amps]
P21 [Rated Amps] x 0.01 / Based on Drive
Rating
RW Real
Fi
le
Grou
p
No.
Display Name
Full Name
Description
Values
Re
ad
-W
ri
te
Da
ta
T
ype
ATTENTION: If a hazard of injury due to movement of equipment or material exists, an auxiliary mechanical braking
device must be used.
ATTENTION: This feature should not be used with synchronous or permanent magnet motors. Motors may be
demagnetized during braking.