Pm cfg] on – Rockwell Automation 21G PowerFlex 750-Series AC Drives Programming Manual User Manual
Page 62
62
Rockwell Automation Publication 750-PM001J-EN-P - October 2014
Chapter 3
Drive Port 0 Parameters
MO
TO
R
C
O
N
TROL
Aut
ot
u
ne
78
Encdrlss AngComp
Encoderless Angle Compensation
Represents electrical angle compensation dependent on motor cable and PWM
Frequency. Determined during autotuning when P35 [Motor Ctrl Mode] is set to one of
the FV modes without speed feedback.
Units:
Default:
Min/Max:
Rad
0.0000
–/+6.2831
RW Real
79
Encdrlss VltComp
Encoderless Voltage Compensation
Represents voltage compensation dependent on motor cable and PWM Frequency.
Determined during autotuning when P35 [Motor Ctrl Mode] is set to one of the FV
modes without speed feedback.
Units:
Default:
Min/Max:
V AC
Based on Drive Rating
0.00 / Based on Drive Rating and Voltage
Class
RW Real
80
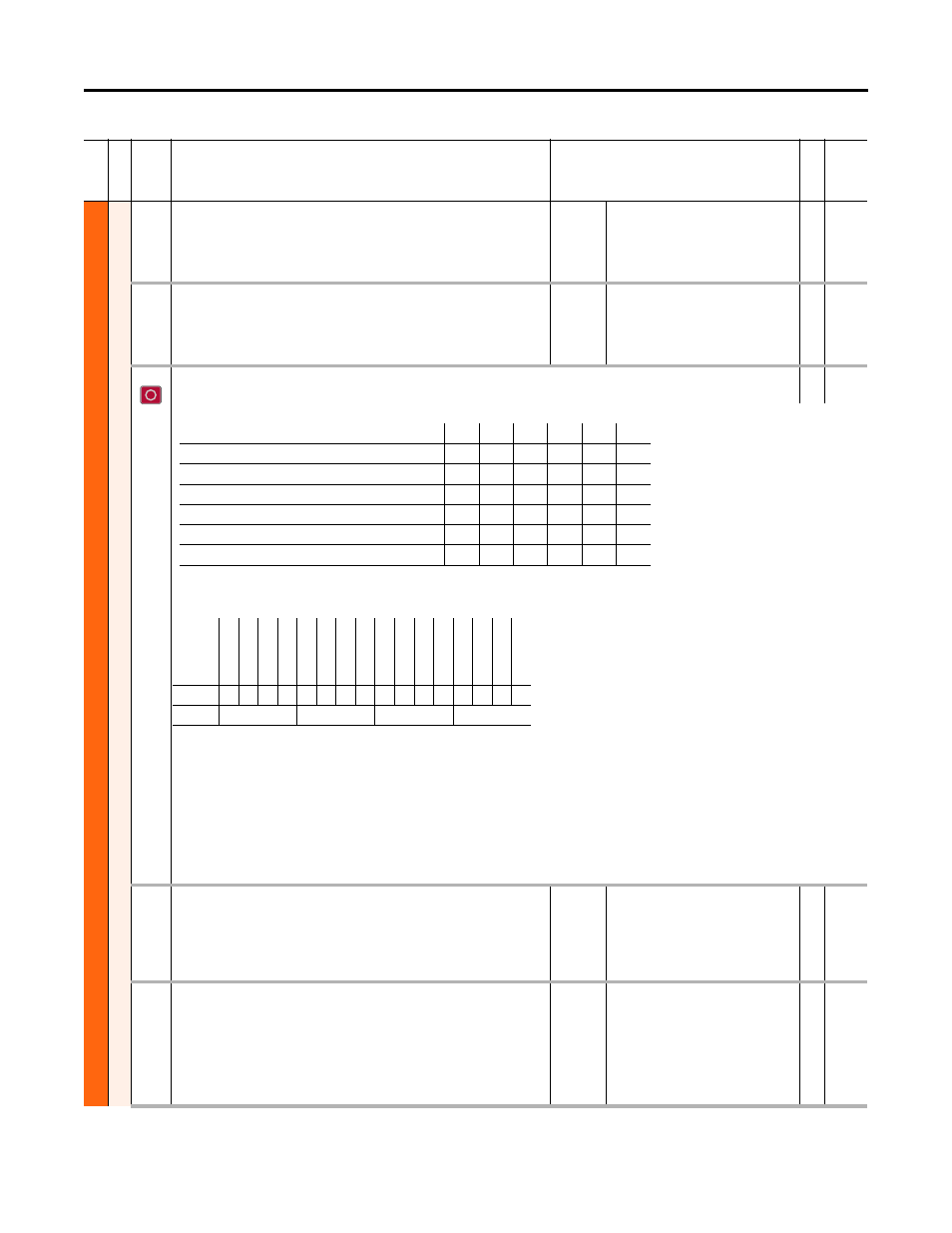
PM Cfg
Permanent Magnet Motor Configuration
RW 16-bit
Integer
This parameter also includes two options for PM FV mode selected by P35 [Motor Ctrl Mode].
Bit 0 “AutoOfstTest” – Enables the PM Offset test to be executed before the drive runs normally after a power cycle or drive reset. Required when the feedback
device is not an absolute feedback device. Cannot be enabled if Bit 2 is enabled. Allow for up to 90° of shaft rotation. The value set in P83 [PM Ofst Tst Cur] may need
to be increased to complete the test. If shaft rotation is not possible, set Bits 0 and 1 to perform a static test at every start.
Bit 1 “Vqs Reg En” – Enables the Vqs regulator.
Bit 2 “StaticTestEn” – Enables the Static test to be executed before the drive starts. Cannot be enabled if Bit 0 is enabled.
Bit 3 “PMStabAnglEn” – Enables the Permanent Magnet Stability Angle regulator. Used for PM FV Encoderless when P35 [Motor Ctrl Mode] = 6 “PM FV” and P125
[Pri Vel Fdbk Sel] = Open Loop.
Bit 4 “IPM Vqs Disa” – Disables Vqs regulator when P35 [Motor Ctrl Mode] = 10 “IPM FV.”
Bit 5 “IPMTqTrmEn” – Enables Torque Trim when P35 [Motor Ctrl Mode] = 10 “IPM FV.”
81
PM PriEnc Offset
Permanent Magnet Motor Primary Encoder Offset
The amount of offset between the primary feedback encoder counts, and the rotor flux
center position of the PM motor. A value of 1024 is equal to 360 electrical degrees. This
parameter is updated during the PM Offset test which runs at the first start after a power
cycle/ system reset (P80 [PM Cfg] Bit 0 = 1) and during autotune in PM FV mode.
Default:
Min/Max:
0
0 / 1023
RW 32-bit
Integer
82
PM AltEnc Offset
Permanent Magnet Motor Alternate Encoder Offset
The amount of offset between the alternate feedback encoder counts, and the rotor flux
center position of the PM motor. A value of 1024 is equal to 360 electrical degrees. This
parameter is updated during the PM Offset test which runs at the first start after a power
cycle/ system reset (P80 [PM Cfg] Bit 0 = 1) and during autotune in PM FV mode. Active
only when Alternate Velocity Feedback is being used during Automatic Tach Switchover
(see P635 [Spd Options Ctrl]).
Default:
Min/Max:
0
0 / 1023
RW 32-bit
Integer
Fi
le
Grou
p
No.
Display Name
Full Name
Description
Values
Re
ad
-W
ri
te
Da
ta
T
ype
Mode
Bit 0
Bit 1
Bit 2
Bit 3
Bit 4
Bit 5
PM with Absolute Feedback (Stegmann, SSI, Heidenhaim)
X
PM with Incremental Encoder (Pulse, SIN/COS)
X
X
PM without Feedback
X
X
X
IPM with Absolute Feedback (Stegmann, SSI, Heidenhaim)
X
IPM with Incremental Encoder (Pulse, SIN/COS)
X
X
IPM without Feedback
X
X
X = 1
Options
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
IP
M
Tq
Trm
En
IP
M V
qs Disa
PM
Stab
Angl
En
St
at
ic
Te
st
En
Vq
s Re
g En
Au
to
O
fs
tT
es
t
Default
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Bit
15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = Disable
1 = Enable