Rockwell Automation 21G PowerFlex 750-Series AC Drives Programming Manual User Manual
Page 65
Rockwell Automation Publication 750-PM001J-EN-P - October 2014
65
Drive Port 0 Parameters
Chapter 3
Fil
e
Gr
ou
p
No.
Display Name
Full Name
Description
Values
Re
ad
-Write
Da
ta T
ype
MOT
O
R
CONTRO
L
Ve
ct
or
R
eg
ul
at
or
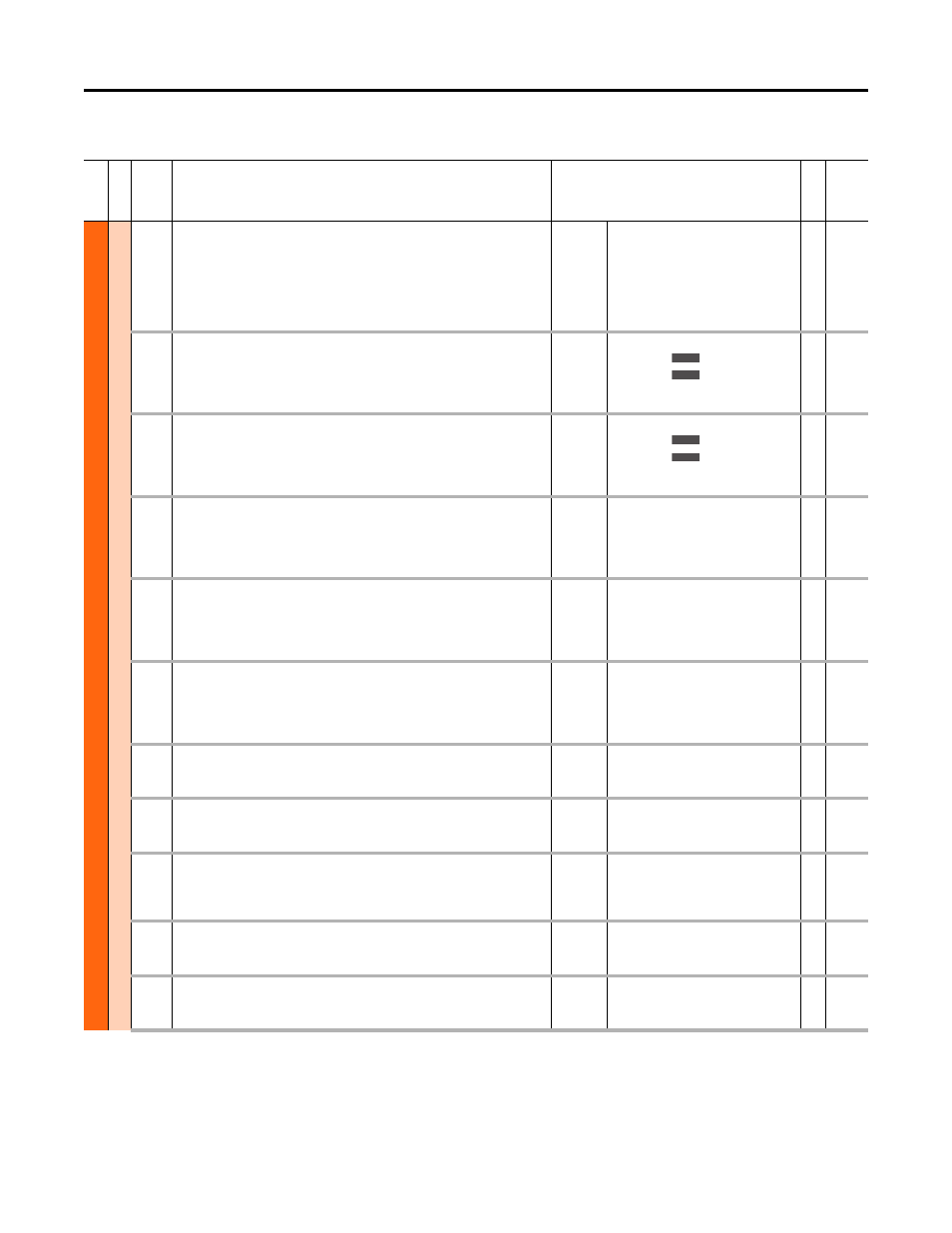
95
VCL Cur Reg BW
Vector Closed Loop Current Regulator Bandwidth
Sets the bandwidth of the current regulator by automatically adjusting the gains (P96
and P97) based on motor autotune results. When the value of bandwidth is zero
(default) the current regulator gains can be manually adjusted. The default values for
P95, P96, and P97 typically provide excellent performance, and do not normally need to
be adjusted.
Units:
Default:
Min/Max:
R/S
0.0
0.0 / 9999.0
RW Real
96
VCL Cur Reg Kp
Vector Closed Loop Current Regulator Proportional Gain
Proportional gain of the current regulator. Can be adjusted when P95 is set to zero. The
default values for P95, P96, and P97 typically provide excellent performance, and do not
normally need to be adjusted.
Default:
Min/Max:
1250.0
0.0 / 50000.0
0.0 / 10000.0
RW Real
97
VCL Cur Reg Ki
Vector Closed Loop Current Regulator Integral Gain
Integral gain of the current regulator. Can be adjusted when P95 is set to zero. The
default values for P95, P96, and P97 typically provide excellent performance, and do not
normally need to be adjusted.
Default:
Min/Max:
60.0
0.0 / 50000.0
0.0 / 10000.0
RW Real
98
VEncdls FReg Kp
Encoderless Vector Frequency Regulator Proportional Gain
Represents electrical angle compensation dependent on motor cable and PWM
Frequency. Determined during autotuning when P35 [Motor Ctrl Mode] is set to one of
the FV modes without speed feedback.
Units:
Default:
Min/Max:
Hz/A
524.0
0.0 / 100000.0
RW Real
99
VEncdls FReg Ki
Encoderless Vector, Frequency Regulator Integral Gain
Determined during autotuning when P35 [Motor Ctrl Mode] is set to one of the FV
modes without speed feedback. Represents voltage compensation dependent on motor
cable and PWM Frequency.
Units:
Default:
Min/Max:
Hz/A
9080.0
0.0 / 100000.0
RW Real
100
Slip Reg Enable
Slip Regulator Enable
Enables or disables the slip frequency regulator. This selection is active only in motor
control mode flux vector induction (P35 [Motor Ctrl Mode] = 3 “Induction FV”) and
encoder feedback is used.
Default:
Options:
1 = “Enabled”
0 = “Disabled”
1 = “Enabled”
RW 32-bit
Integer
101
Slip Reg Ki
Slip Regulator Integral Gain
Integral gain for the slip frequency regulator.
Default:
Min/Max:
10.00
0.00 / 10000.00
RW Real
102
Slip Reg Kp
Slip Regulator Proportional Gain
Proportional gain for the slip frequency regulator.
Default:
Min/Max:
0.50
0.00 / 10000.00
RW Real
103
Flux Reg Enable
Flux Regulator Enable
Enables or disables the flux regulator. This selection is active only in motor control mode
flux vector induction (P35 [Motor Ctrl Mode] = 3 “Induction FV”).
Default:
Options:
1 – Enabled
0 – Disabled
1 – Enabled
RW 32-bit
Integer
104
Flux Reg Ki
Flux Regulator Integral Gain
Integral gain for the flux regulator.
Default:
Min/Max:
30.00
0.00 / 10000.00
RW Real
105
Flux Reg Kp
Flux Regulator Proportional Gain
Proportional gain for the flux regulator.
Default:
Min/Max:
1.00
0.00 / 10000.00
RW Real
753
755
753
755