Rockwell Automation 21G PowerFlex 750-Series AC Drives Programming Manual User Manual
Page 174
174
Rockwell Automation Publication 750-PM001J-EN-P - October 2014
Chapter 3
Drive Port 0 Parameters
APPLIC
AT
ION
S
Proces
s P
ID
1084
PID LP Filter BW
PID Low Pass Filter Bandwidth
Sets the level of filtering applied to the error signal. Zero will disable this filter.
Units:
Default:
Min/Max:
R/S
0.00
0.00 / 100.00
RW Real
1085
PID Preload
PID Preload
Sets the value used to preload PID Integrator when PID is enabled and P1065 [PID Cfg]
Bit 0 “Preload Int” is set to 1.
Units:
Default:
Min/Max:
%
0.00
–/+100.00
RW Real
1086
PID Prop Gain
PID Proportional Gain
Sets the value for the PID proportional component.
PID ErrorMeter x PID Prop Gain = PID Output
Default:
Min/Max:
1.00
0.00 / 100.00
RW Real
1087
PID Int Time
PID Integral Time
Time required for the integral component to reach 100% of P1092 [PID Error Meter]. Not
used when P1066 [PID Control] Bit 1 “PID Hold” = 1 (enabled).
Units:
Default:
Min/Max:
Secs
1.00
0.00 / 100.00
RW Real
1088
PID Deriv Time
PID Derivative Time
Refer to formula below:
KD = P1088
d
PI Error
= Error - Last Error
d
t
= Interrupt Time
A setting of zero disables this parameter.
Units:
Default:
Min/Max:
Secs
0.00
0.00 / 100.00
RW Real
1089
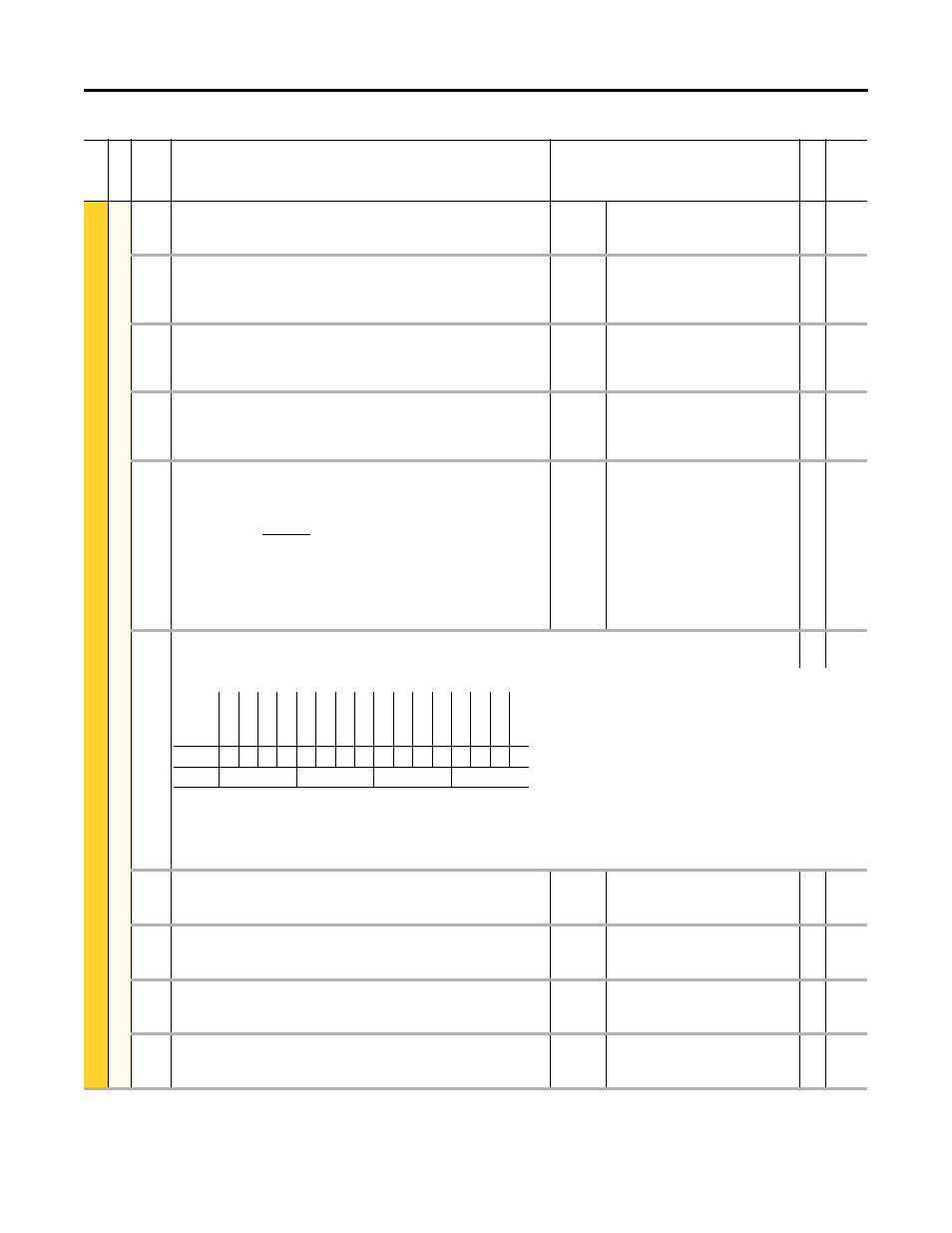
PID Status
PID Status
RO
16-bit
Integer
Status of the Process PI regulator.
Bit 0 “PID Enable” – PID controller is enabled.
Bit 1 “PID Hold” – Hold PID integrator.
Bit 2 “PID Reset” – Reset PID integrator.
Bit 3 “PID In Limit” – PID in limit.
1090
PID Ref Meter
PID Reference Meter
Present value of the PI reference signal.
Units:
Default:
Min/Max:
%
0.00
–/+100.00
RO
Real
1091
PID Fdbk Meter
PID Feedback Meter
Present value of the PI feedback signal.
Units:
Default:
Min/Max:
%
0.00
–/+100.00
RO
Real
1092
PID Error Meter
PID Error Meter
Present value of the PI error.
Units:
Default:
Min/Max:
%
0.00
–/+200.00
RO
Real
1093
PID Output Meter
PID Output Meter
Present value of the PI output.
Units:
Default:
Min/Max:
%
0.00
–/+800.00
RO
Real
Fi
le
Grou
p
No.
Display Name
Full Name
Description
Values
Re
ad
-W
ri
te
Da
ta
T
ype
d
PI Error
(%)
d
t
(Sec)
PID
Out
= KD (Sec) x
Options
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
Re
se
rv
ed
PID In Limit
PID Re
set
PID Hold
PID En
ab
led
Default
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Bit
15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = Condition False
1 = Condition True