Rockwell Automation 21G PowerFlex 750-Series AC Drives Programming Manual User Manual
Page 160
160
Rockwell Automation Publication 750-PM001J-EN-P - October 2014
Chapter 3
Drive Port 0 Parameters
DIA
G
NOSTICS
St
at
us
937
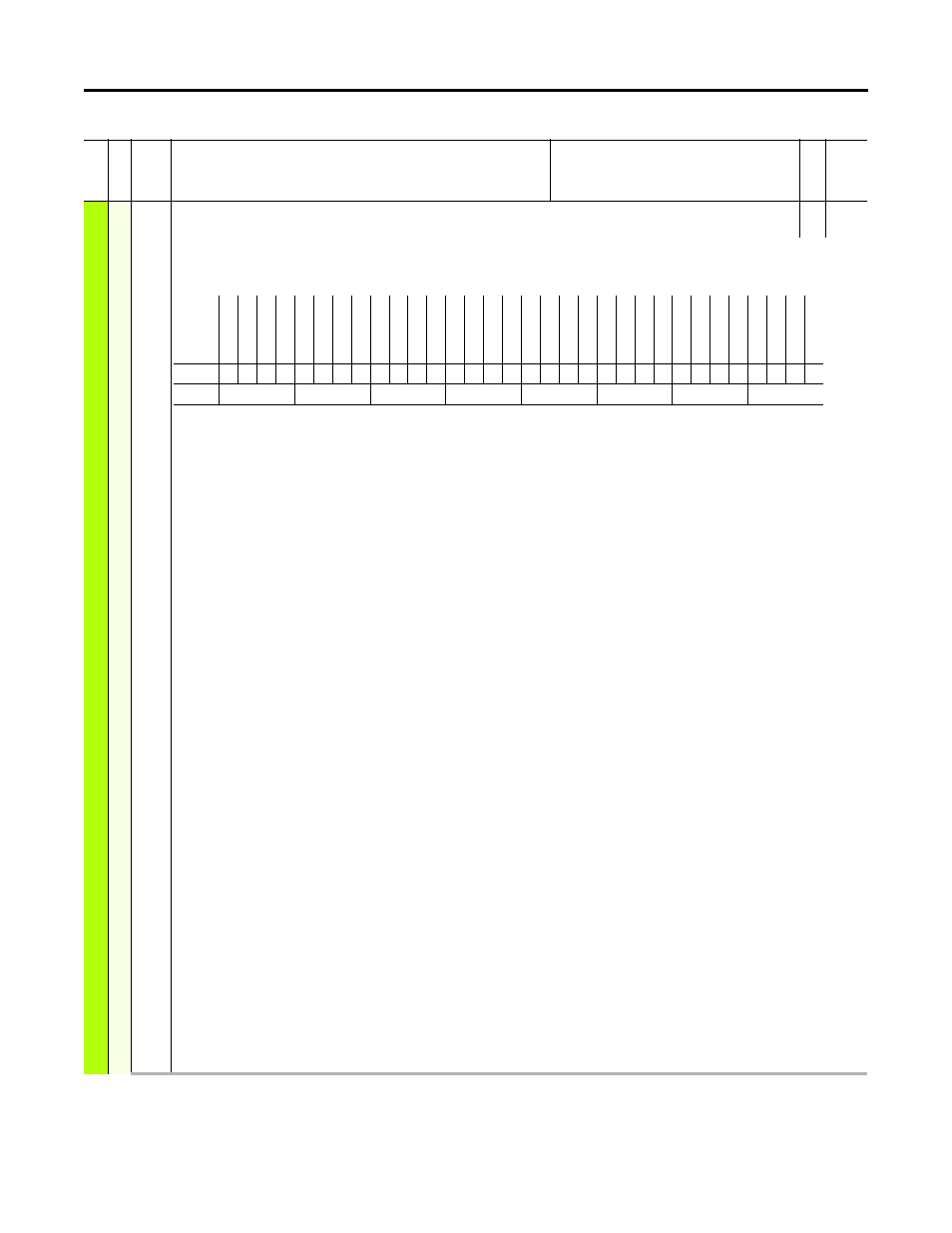
Condition Sts 1
Condition Status 1
RO
32-bit
Integer
Status of conditions that may or may not result in the drive taking action (faulting), based on configuration of protective functions.
The occurrence of conditions that have been configured as faults are indicated by P952 [Fault Status A] and those configured as alarms are indicated by P959 [Alarm
Status A].
Bit 0 “Power Loss” – A Power Loss exception has been issued. Power Loss detection is a function of the bus manager and is configured by [Pwr Loss Mode n] and
[Pwr Loss n Level]. The corresponding fault and alarm are processed in the background according to P449 [Power Loss Actn] and the state of this bit.
Bit 1 “UnderVoltage” – An Under Voltage exception has been issued. Parameter 460 [UnderVltg Action] must be set to an option other than 0 “Ignore” for this bit to
be set. The corresponding fault and alarm are processed immediately within the same precharge function where the condition status bit is detected.
Bit 2 “Motor OL” – An excessive motor load exists. If P410 [Motor OL Actn] is set to option 0 “Ignore” the overload function will not produce a condition status bit,
alarm status, or fault status. If P410 [Motor OL Actn] is set to option 1 “Alarm” the condition status bit and alarm will be set when the overload value exceeds P412
[Mtr OL Alarm Lvl]. Parameter 412 [Mtr OL Alarm Lvl] must be set to an option other than 0 “Ignore’ to produce a condition status bit alarm.
Bit 3 “Load Loss” – This bit dependent on the setting of P441 [Load Loss Action] which must be set to an option other than 0 “Ignore” to be processed. The
corresponding fault and alarm are processed in the background according to P441 [Load Loss Action] and the state of this bit.
Bit 4 “InPhaseLoss” – Input Phase Loss exception has been issued. The corresponding fault and alarm are processed in the background according to P462 [InPhase
LossActn] and the state of this bit. Parameter 462 [InPhase LossActn] is not used to inhibit this bit.
Bit 5 “OutPhaseLoss” – Output Phase Loss exception has been issued. The corresponding fault and alarm are processed in the background according to P444
[OutPhaseLossActn] and the state of this bit. Parameter 444 [OutPhaseLossActn] is not used to inhibit this bit.
Bit 6 “Decel Inhib” – The drive is being Inhibited from decelerating to the commanded speed. If the drive is not decelerating (P935 [Drive Status 1] Bit 5 = 0), is not
in the Run state, or if P635 [Spd Options Ctrl] Bit 0 = 1, this bit is cleared. Otherwise this bit is set when a decel inhibit condition is detected. Parameter 409 [Dec
Inhibit Actn] has no affect on this bit.
Bit 7 “Shear Pin 1” – Value set in P436 [Shear Pin1 Level] has been reached or exceeded. Parameter 435 [Shear Pin 1 Actn] must be set to an option other than 0
“Ignore” for this bit to be set. The corresponding fault and alarm are processed in the background according to P435 [Shear Pin 1 Actn] and the state of this bit.
Bit 8 “Shear Pin 2” – Value set in P439 [Shear Pin2 Level] has been reached or exceeded. Parameter 438 [Shear Pin 2 Actn] must be set to an option other than 0
“Ignore” for this bit to be set. The corresponding fault and alarm are processed in the background according to P438 [Shear Pin 2 Actn] and the state of this bit.
Bit 9 “PriFdbkLoss” – When set, indicates that the device selected as the primary velocity feedback source has reported a device failure. P125 [Pri Vel Fdbk Sel]
selects the device used as the primary velocity feedback source. The primary feedback device supplies motor speed feedback if the Automatic Tach Switchover
option is either disabled or has not switched to the alternate feedback device. In order to report this condition as an alarm, the feedback loss configuration
parameter for the primary feedback device must be configured for “Alarm.”
Bit 10 “AltFdbkLoss” – When set, indicates that the device selected as the alternate velocity feedback source has reported a device failure. P128 [Alt Vel Fdbk Sel]
selects the device used as the alternate velocity feedback source. The alternate feedback device supplies motor speed feedback if the Automatic Tach Switchover
option is enabled and the primary feedback device has failed. In order to report this condition as an alarm, the feedback loss configuration parameter for the
alternate feedback device must be configured for “Alarm.”
Bit 11 “AuxFdbkLoss” – When set, indicates that the device selected as the auxiliary velocity feedback source has reported a device failure. P132 [Aux Vel Fdbk Sel]
selects the device used as the auxiliary velocity feedback source. The auxiliary feedback device can be used to supply motor speed reference. In order to report this
condition as an alarm, the feedback loss configuration parameter for the auxiliary feedback device must be configured for “Alarm.”
Bit 12 “PosFdbkLoss” – When set, indicates that the device selected as the position feedback source has reported a device failure. P135 [Psn Fdbk Sel] selects the
device used as the position feedback source. Position feedback is used for position control applications. It can be the same device used for velocity feedback or
position feedback can be supplied by a separate device. In order to report this condition as an alarm, the feedback loss configuration parameter for the position
feedback device must be configured for “Alarm.”
Bit 13 “ExtPrchrgErr” – Selected digital input assigned to the external Precharge Seal control, P190 [DI Prchrg Seal], is not active when the bus has stabilized. The
corresponding fault and alarm are processed according to P323 [Prchrg Err Cfg] and the state of this bit.
Bit 14 “GndWarning” – Value set in P467 [Ground Warn Lvl] has been exceeded. Parameter 466 [Ground Warn Actn] must be set to an option other than 0 “Ignore”
for this bit to be set. The corresponding fault and alarm are processed in the background based on P466 [Ground Warn Actn] and the state of this bit.
Bit 15 “OW Timeout” – The value set in P1172 [TorqAlarm Timeout] has been exceeded. This bit is set by the pump off algorithm. The corresponding fault and alarm
are processed in the background based on the state of this bit.
Fi
le
Grou
p
No.
Display Name
Full Name
Description
Values
Re
ad
-W
ri
te
Da
ta
T
ype
Options
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
Re
ser
ve
d
OW
T
imeout
(1)
(1) 753 drives only
Gn
dW
arni
ng
Ex
tPr
chr
gE
rr
Po
sF
dbkL
oss
Au
xF
dbkL
oss
AltF
dbkL
os
s
Pr
iF
dbkL
oss
Shear Pin
2
Shear Pin
1
De
ce
l I
nh
ib
O
utPhaseL
oss
In
PhaseL
oss
Lo
ad
Lo
ss
Mot
or OL
Un
derV
ol
ta
ge
Po
w
er
L
os
s
Default
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Bit
31 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = Condition False
1 = Condition True