Motor overload – Rockwell Automation 21G PowerFlex 750-Series AC Drives Programming Manual User Manual
Page 515
Rockwell Automation Publication 750-PM001J-EN-P - October 2014
515
Integrated Motion on EtherNet/IP
Appendix E
Motor Overload
There is a difference between how Kinetix handles an overload condition
compared to the PowerFlex755 drive. Kinetix is Motor Capacity whereas
PowerFlex 755 is Motor Overload.
The Motion attribute, Inverter Capacity, is a real-time estimate of the continuous
rated motor thermal capacity that is utilized during operation that is based on the
motor thermal model. A value of 100% would indicate that the motor is being
used at 100% of rated capacity as determined by the continuous current rating of
the motor.
The PowerFlex 755 parameter, P940 [Drive OL Count], indicates power unit
overload (I
2
T) in percentage. The value remains at 0 until 100% of Rated
Current is reached then the Overload measurement begins. When the value
reaches 100%, the power unit overload fault occurs.
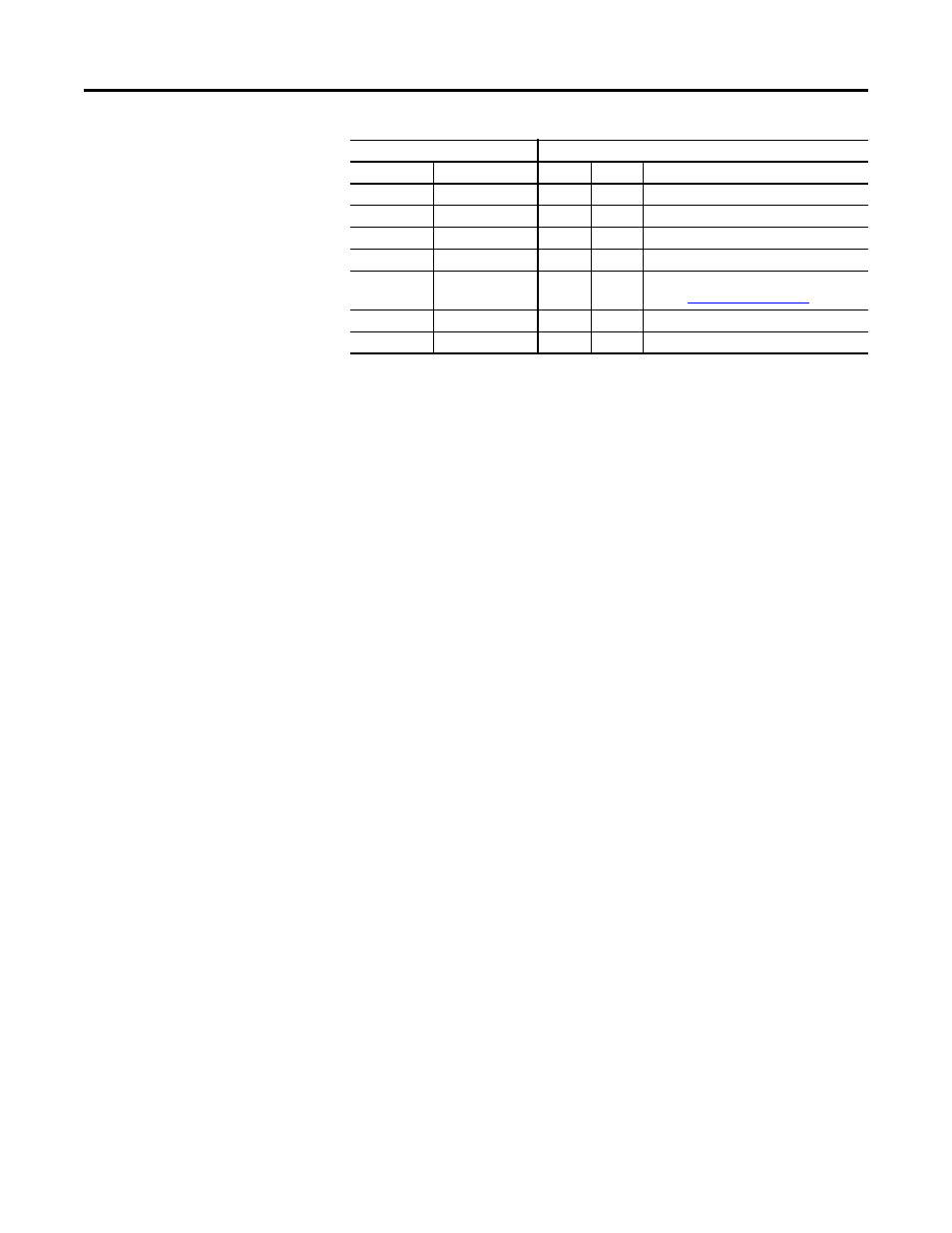
P839
Psn Reg Kp
441
1B9
Kpp
P842
PsnReg IntgrlOut
437
1B5
Position Integrator Output
P843
PsnReg Spd Out
438
1B6
Position Loop Output
P847 Psn
Fdbk
434
1B2
Position
Feedback
P940
Drive OL Count
636
27C
Inverter Capacity
(See See
)
P942
IGBT Temp C
641
281
Inverter Temperature
P944
Drive Temp C
640
280
Inverter Heatsink Temperature
Drive
Integrated Motion
Parameter No.
Parameter Name
Base 10
Base 16
Integrated Motion on EtherNet/IP Instance