Decel inhibit, Torq prove cflct, Ipm overcurrent – Rockwell Automation 21G PowerFlex 750-Series AC Drives Programming Manual User Manual
Page 314
314
Rockwell Automation Publication 750-PM001J-EN-P - October 2014
Chapter 6
Troubleshooting
20
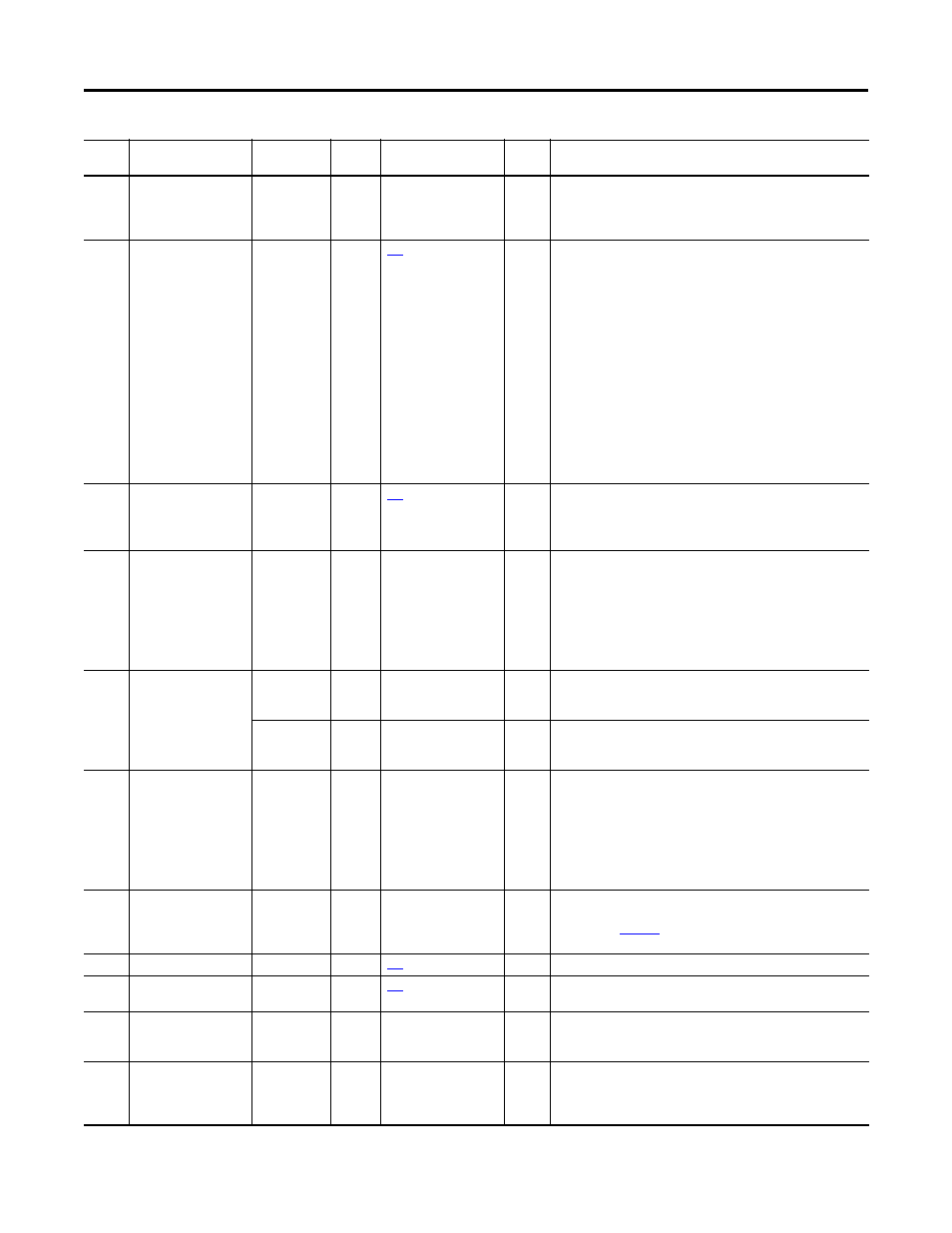
TorqPrv Spd Band
Resettable
Fault
Coast
The difference between P2 [Commanded SpdRef] and P3 [Mtr Vel Fdbk]
has exceeded the level programmed in P1105 [Speed Dev Band] for a
time period greater than the time programmed in P1106 [SpdBand
Intgrtr].
21
Output PhaseLoss
Configurable
The current in one or more phases has been lost or remains below the
threshold set in P445 [Out PhaseLossLvl] for one second. Decreasing the
threshold will make the drive less sensitive to tripping. This is usually
necessary when the motor is smaller than the drive rating.
If TorqProve is active, the current in one or more phases has been lost or
remains below a threshold for 5 msecs. The phases are checked at start
to ensure torque will be delivered to the load. If the drive is faulting on
start, increase P44 [Flux Up Time].
If TorqProve is active, and the brake is slipping, this fault will occur.
When TorqProve is used, before the signal to the brake is applied to
release it, the flux up time is used to check the three phases. The angle is
adjusted to ensure current is flowing through all three phases. If the
motor moves during this test, the brake is not holding and a phase loss
can occur.
If TorqProve is active, and no brake is present, this fault will occur.
Check for an open output contactor.
24
Decel Inhibit
Configurable
[Dec Inhibit Actn]
The drive is not following a commanded deceleration because it is
attempting to limit the bus voltage.
For high inertia loads, set P621 [Slip RPM at FLA] to 0 (V/Hz and SVC
modes only).
25
OverSpeed Limit
Resettable
Fault
Coast
Y
The motor operating speed exceeds the limit set by the maximum speed
setting P524 [Overspeed Limit]. For forward motor rotation, this limit is
P520 [Max Fwd Speed] + P524 [Overspeed Limit]. For reverse motor
rotation, this limit is P521 [Max Rev Speed] - P524 [Overspeed Limit].
When flux vector control modes are selected in P35 [Motor Ctrl Mode]
the motor operating speed is determined by P131 [Active Vel Fdbk]. For
all other non-flux vector control modes, the motor operating speed is
determined by P1 [Output Frequency].
26
Brake Slipped
Alarm 1
The encoder movement has exceeded the level in P1110 [Brk Slip Count]
after the brake was set and the brake slip maneuver is controlling the
drive. (Drive is active.) Cycle power to the drive to reset.
Alarm 2
The encoder movement has exceeded the level in P1110 [Brk Slip Count]
after the brake was set and the brake slip maneuver is finished. (Drive is
stopped.) Cycle power to the drive to reset.
27
Torq Prove Cflct
Alarm 2
When P1100 [Trq Prove Cfg] is enabled, P35 [Motor Ctrl Mode] must be
properly set, and P125 [Pri Vel Fdbk Sel] and P135 [Mtr Psn Fdbk Sel]
must be set to a valid feedback device (does not have to be the same
device, and Open Loop and Simulation Feedback are not considered
valid feedback devices). If these parameters point to a feedback module,
the module parameters must also be properly set. On the module, the
feedback loss action CANNOT be set to 0 "Ignore.” Does not work in PM
FV mode. Does not work with single ended or channel A only encoders.
28
TP Encls Config
Alarm 2
Encoderless TorqProve has been enabled but user has not read and
understood application concerns of encoderless operation. Read the
“Attention” on
relating to the use of TorqProve with no
encoder.
29
Analog In Loss
Configurable
Analog input has a lost signal.
33
AuRsts Exhausted
Resettable
Fault
Coast
The drive unsuccessfully attempted to reset a fault and resume running
for the programmed number of tries.
35
IPM OverCurrent
Resettable
Fault
Coast
The current magnitude has exceeded the trip level set by P1640 [IPM
Max Cur]. This value should be set to 0 only when the drive is set to the
V/Hz or SVC mode.
36
SW OverCurrent
Resettable
Fault
Coast
Y
The drive output current has exceeded the 1 ms current rating. This
rating is greater than the 3 second current rating and less than the
hardware overcurrent fault level. It is typically 200…250% of the drive
continuous rating.
Event
No.
Fault/Alarm Text
Type
Fault
Action
Configuration
Parameter
Auto
Reset
Description/Action(s)