Rockwell Automation 21G PowerFlex 750-Series AC Drives Programming Manual User Manual
Page 93
Rockwell Automation Publication 750-PM001J-EN-P - October 2014
93
Drive Port 0 Parameters
Chapter 3
DR
IV
E CFG
St
ar
t F
ea
tur
es
361
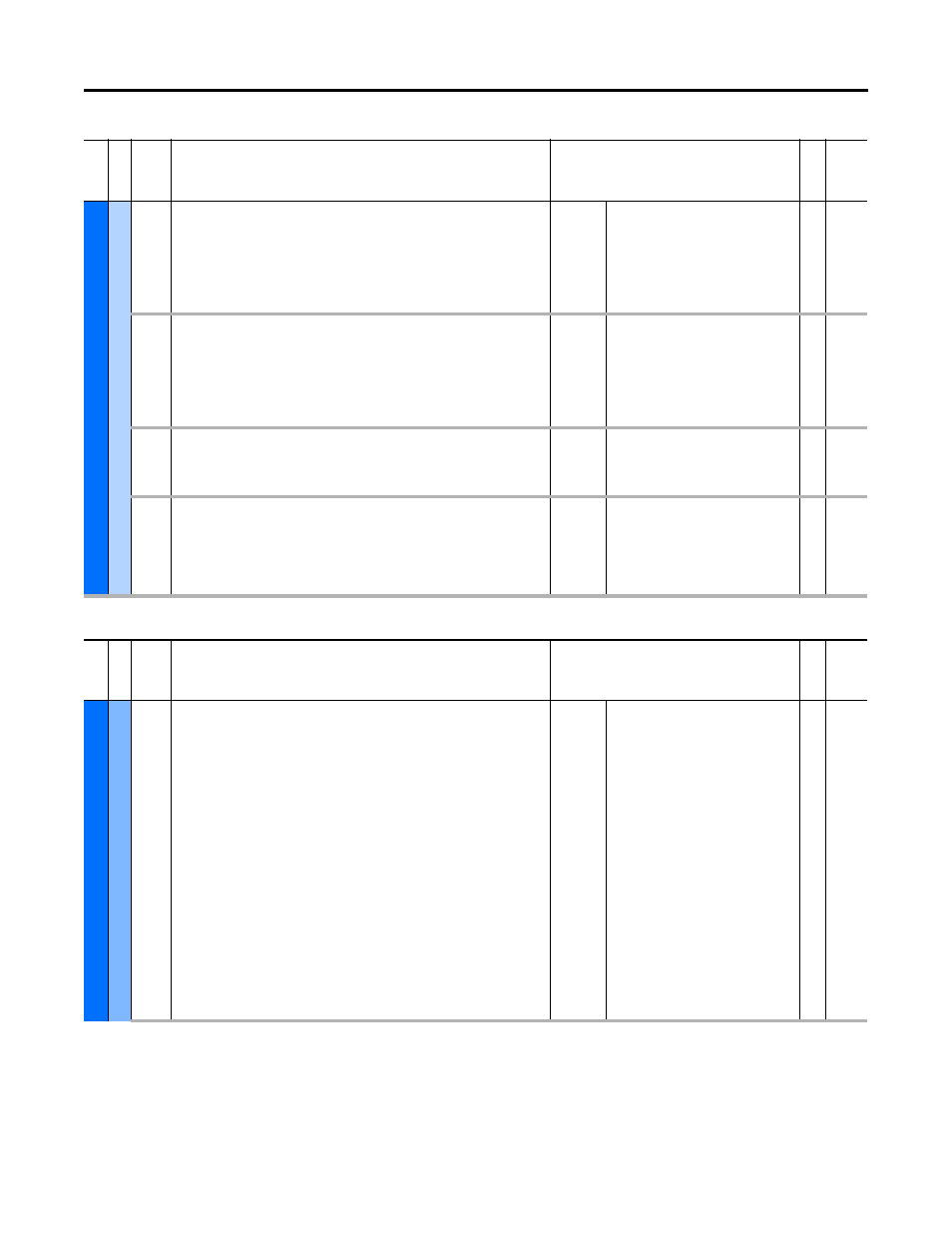
FS Excitation Ki
Flying Start Excitation Integral Gain
P356 [FlyingStart Mode] = 1 “Enhanced”: Integral term used in the current regulator
which controls the excitation function when the need is determined by the reconnect
function.
P356 [FlyingStart Mode] = 2 “Sweep”: Integral term used to control initial output
voltage.
Default:
Min/Max:
60.0
0.0 / 32767.0
RW Real
362
FS Excitation Kp
Flying Start Excitation Proportional Gain
P356 [FlyingStart Mode] = 1 “Enhanced”: Proportional term used in the current
regulator which controls the excitation function when the need is determined by the
reconnect function.
P356 [FlyingStart Mode] = 2 “Sweep”: Proportional term used to control initial output
voltage.
Default:
Min/Max:
1200.00
0.0 / 32767.0
RW Real
363
FS Reconnect Dly
Flying Start Reconnect Delay
Delay time used between the issued start command and the start of the reconnect
function.
Units:
Default:
Min/Max:
mSec
50.00
0.10 / 10000.00
RW Real
364
FS Msrmnt CurLvl
Flying Start Measurement Current Level
P356 [FlyingStart Mode] = 1 “Enhanced”: Level of the current used during the
measurement stage of the reconnect function.
P356 [FlyingStart Mode] = 2 “Sweep”: Adjustment for the V/Hz end point. Used to
change the slope of the V/Hz curve during the frequency sweep.
Default:
Min/Max:
44.97
0.00 / 4096.00
RW Real
Fi
le
Grou
p
No.
Display Name
Full Name
Description
Values
Re
ad
-W
ri
te
Da
ta
T
ype
Fil
e
Gr
oup
No.
Display Name
Full Name
Description
Values
Read-W
rite
Da
ta
T
yp
e
DR
IVE CFG
Bra
ki
n
g F
ea
tur
es
370
371
Stop Mode A
Stop Mode B
Stop Mode A, B
Method of stopping the drive when a stop command is given. Normal Stop command
and the RUN input changing from true to false will command a Normal Stop. When
using TorqProve, parameter 1100 [Trq Prove Cfg] Bit 0 “TP Enable” = 1, the stop mode
must be set to option 1 “Ramp.”
“Coast” (0) – Power removed from motor, motor coasts to zero.
“Ramp” (1) – Decelerates to zero speed at the decel rate. Power is removed when zero
speed is reached.
“Ramp to Hold” (2) – Decelerates to zero speed at the decel rate, followed by DC braking
until the next start sequence.
“DC Brake” (3) – DC braking is immediately applied (does not follow programmed decel
ramp). May have to adjust parameter 397 [DC Brake Kp].
“DCBrkAutoOff” (4) – Applies DC braking until zero speed is reached or DC brake time is
reached, whichever is shorter.
“Current Lmt” (5) – Max torque / current applied until zero speed.
“Fast Brake” (6) – High slip braking for maximum braking performance above base
speed.
Default
Options:
1 = “Ramp”
0 = “Coast”
0 = “Coast”
1 = “Ramp”
2 = “Ramp to Hold”
3 = “DC Brake”
4 = “DCBrkAutoOff”
5 = “Current Lmt”
6 = “Fast Brake”
RW 32-bit
Integer