Rockwell Automation 21G PowerFlex 750-Series AC Drives Programming Manual User Manual
Page 189
Rockwell Automation Publication 750-PM001J-EN-P - October 2014
189
Drive Port 0 Parameters
Chapter 3
APPLIC
AT
IONS
Pr
of
ili
n
g
1220
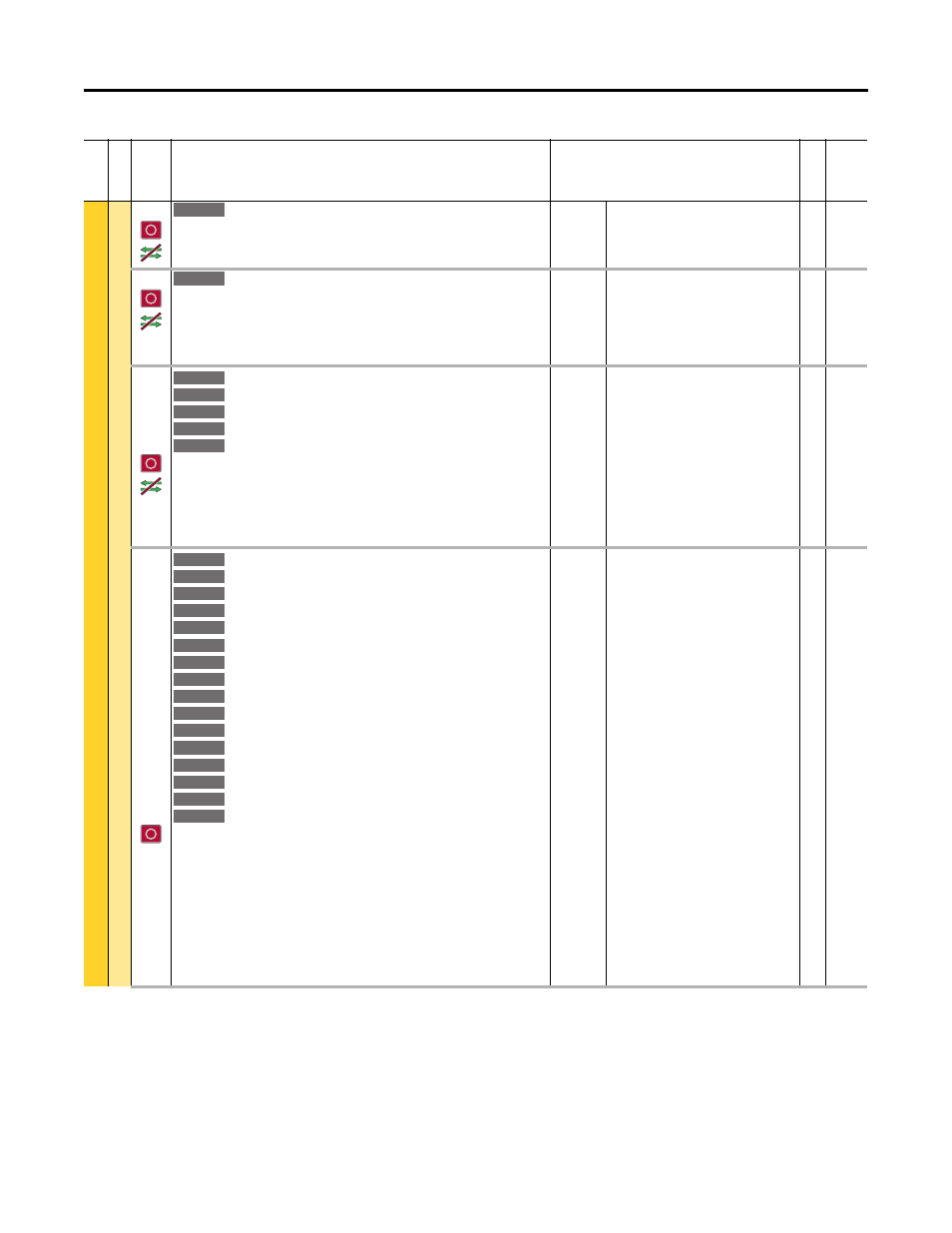
DI Abort Profile
Digital Input Abort Profile
Sets a digital input port for the abort profile in profile/indexer control logic. Polarity of
active state is defined by P1217 [Prof DI Invert] Bit 2 “AbortProfile.”
Default:
Min/Max:
0.00
0.00 / 159999.15
RW 32-bit
Integer
1221
DI Vel Override
Digital Input Velocity Profile
Sets a digital input port for the velocity override in profile/indexer control logic. The
digital input assigned by this parameter is equivalent to P1213 [Profile Command] Bit 9
“Vel Override.” Polarity of active state is defined by P1217 [Prof DI Invert] Bit 3 “Vel
Override.”
Default:
Min/Max:
0.00
0.00 / 159999.15
RW 32-bit
Integer
1222
1223
1224
1225
1226
DI StrtStep Sel0
DI StrtStep Sel1
DI StrtStep Sel2
DI StrtStep Sel3
DI StrtStep Sel4
Digital Input Start Step Select n
Set digital input ports for the start step in profile/indexer control logic. The digital inputs
assigned by these parameters are equivalent to P1213 [Profile Command] Bit 4
“StrStepSel4.” Polarities of active state are defined by P1217 [Prof DI Invert] Bit 4
“StrStepSel0” to Bit 8 “StrStepSel4.”
Default:
Min/Max:
0.00
0.00 / 159999.15
RW 32-bit
Integer
1230
1240
1250
1260
1270
1280
1290
1300
1310
1320
1330
1340
1350
1360
1370
1380
Step 1 Type
Step 2 Type
Step 3 Type
Step 4 Type
Step 5 Type
Step 6 Type
Step 7 Type
Step 8 Type
Step 9 Type
Step 10 Type
Step 11 Type
Step 12 Type
Step 13 Type
Step 14 Type
Step 15 Type
Step 16 Type
Step n Type
Set type of move for a particular step. The possible step types are:
“Speed” (0) = Speed Profile moves in speed mode.
“Position Abs” (1) = Position Absolute moves in absolute position mode.
“PositionIncr” (2) = Position Incremental moves in position increment mode.
The drive must have the direction mode set to the bipolar for the position regulator to
function properly. The current, torque, and regen power limits must be set so as not to
limit the programmed deceleration time. If the limits occur, the position regulator may
overshoot the position set point.
Default:
Options:
0 = “Speed”
0 = “Speed”
1 = “Position Abs”
2 = “PositionIncr”
RW 32-bit
Integer
Fi
le
Grou
p
No.
Display Name
Full Name
Description
Values
Re
ad
-W
ri
te
Da
ta
T
ype
755
755
755
755
755
755
755
755
755
755
755
755
755
755
755
755
755
755
755
755
755
755
755