Rockwell Automation 21G PowerFlex 750-Series AC Drives Programming Manual User Manual
Page 75
Rockwell Automation Publication 750-PM001J-EN-P - October 2014
75
Drive Port 0 Parameters
Chapter 3
FEEDBA
CK & I/O
D
igin F
u
nc
tio
n
s
198
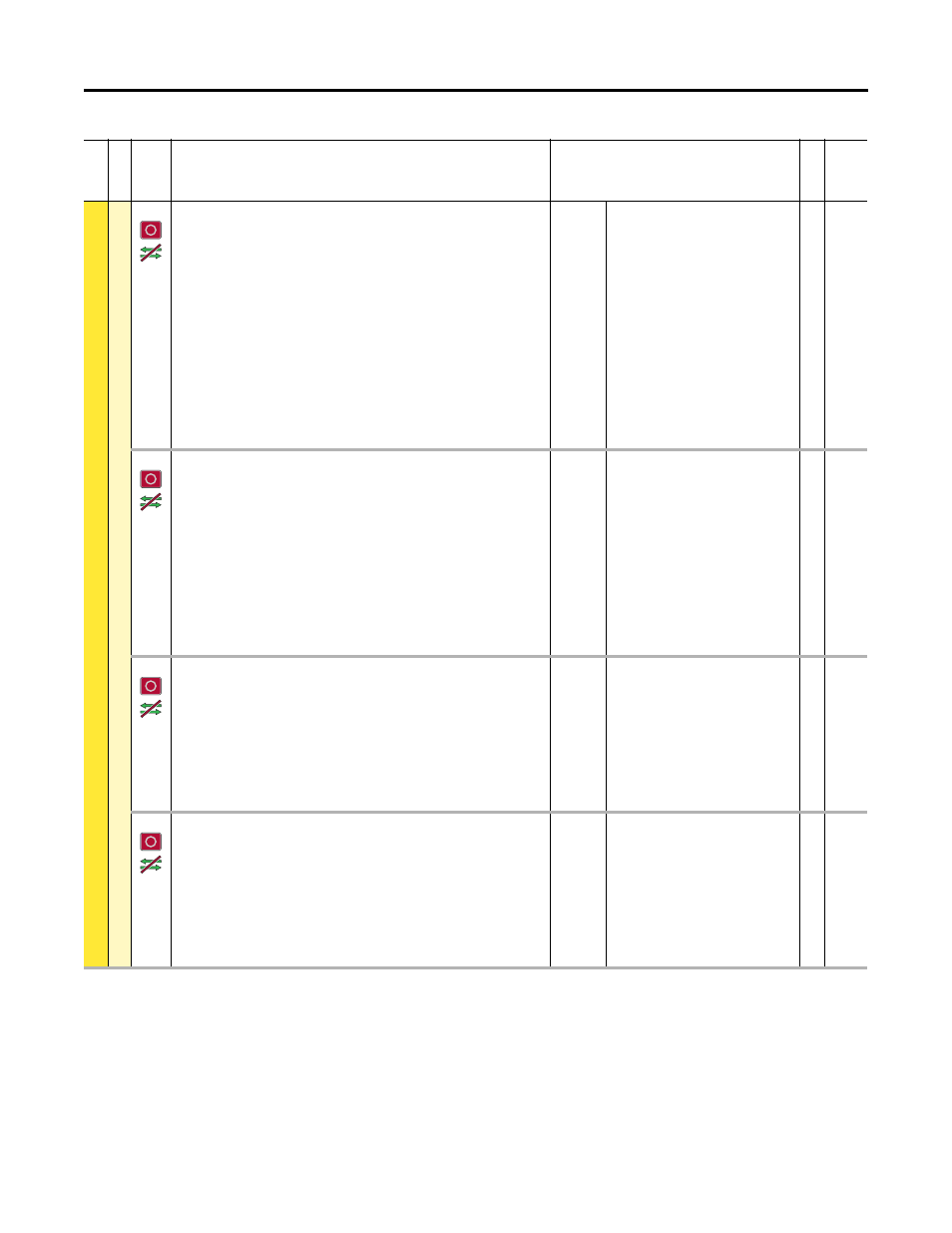
DI Rev End Limit
Digital Input Reverse End Limit
Assigns a digital input used to trigger a Reverse End Limit.
The resulting action depends on whether the drive is operating as a speed, torque or
position regulator. The mode of operation is indicated by parameter 935 [Drive Status 1]
Bit 21 “Speed Mode,” Bit 22 “PositionMode” and Bit 23 “Torque Mode.”
When the drive is operating as a speed regulator, the resulting action is to execute a
“Fast Stop” command. After the drive stops in this case, it will only restart in the
opposite direction (if given a new start command). This function is usually used with a
limit switch near the point at which the drive should stop.
When the drive is operating as a torque regulator, the resulting action is to execute a
“Fast Stop” command. After the drive stops in this case, it will restart and continue
operation (if given a new start command).
When the drive is operating as a position regulator, the resulting action is to execute a
“Fast Stop” command. After the drive stops in this case, it will restart and continue to
move towards the position reference (if given a new start command).
Default:
Min/Max:
0.00
0.00 / 159999.15
RW 32-bit
Integer
199
DI Rev Dec Limit
Digital Input Reverse Deceleration Limit
Assigns a digital input used to trigger a Reverse Decel Limit.
The resulting action depends on whether the drive is operating as a speed, torque or
position regulator. The mode of operation is indicated by parameter 935 [Drive Status 1]
Bit 21 “Speed Mode,” Bit 22 “PositionMode” and Bit 23 “Torque Mode.”
When the drive is operating as a speed regulator, the resulting action is to override the
speed reference and decelerate to Preset Speed 1. This function is usually used with a
limit switch and initiates the slowing down process prior to encountering the End Limit.
When the drive is operating as a torque regulator, the drive ignores this signal and
continues operating at its torque reference.
When the drive is operating as a position regulator, the drive ignores this signal and
continues moving towards its position reference.
Default:
Min/Max:
0.00
0.00 / 159999.15
RW 32-bit
Integer
200
DI PHdwr OvrTrvl
Digital Input Positive Hardware Over Travel
Assigns a digital input used to trigger a Positive Hardware Over-travel.
The resulting action is to immediately fault and produce zero torque. After the drive is
stopped, the condition will need to be cleared and the fault will need to be reset. The
drive will restart (if given a new start command), and continue operation. It will follow
any speed reference, position reference or torque reference. The drive’s direction is not
modified or limited after the restart. This function is usually used with a limit switch in a
position beyond the “End Limit,” as an extra safety limit to prevent torque from
damaging the machine in an over-travel situation.
Default:
Min/Max:
0.00
0.00 / 159999.15
RW 32-bit
Integer
201
DI NHdwr OvrTrvl
Digital Input Negative Hardware Over Travel
Assigns a digital input used to trigger a Negative Hardware Over-travel.
The resulting action is to immediately fault and produce zero torque. After the drive is
stopped, the condition will need to be cleared and the fault will need to be reset. The
drive will restart (if given a new start command), and continue operation. It will follow
any speed reference, position reference or torque reference. The drive’s direction is not
modified or limited after the restart. This function is usually used with a limit switch in a
position beyond the “End Limit,” as an extra safety limit to prevent torque from
damaging the machine in an over-travel situation.
Default:
Min/Max:
0.00
0.00 / 159999.15
RW 32-bit
Integer
Fi
le
Grou
p
No.
Display Name
Full Name
Description
Values
Re
ad
-W
ri
te
Da
ta
T
ype