Rockwell Automation 21G PowerFlex 750-Series AC Drives Programming Manual User Manual
Page 208
208
Rockwell Automation Publication 750-PM001J-EN-P - October 2014
Chapter 3
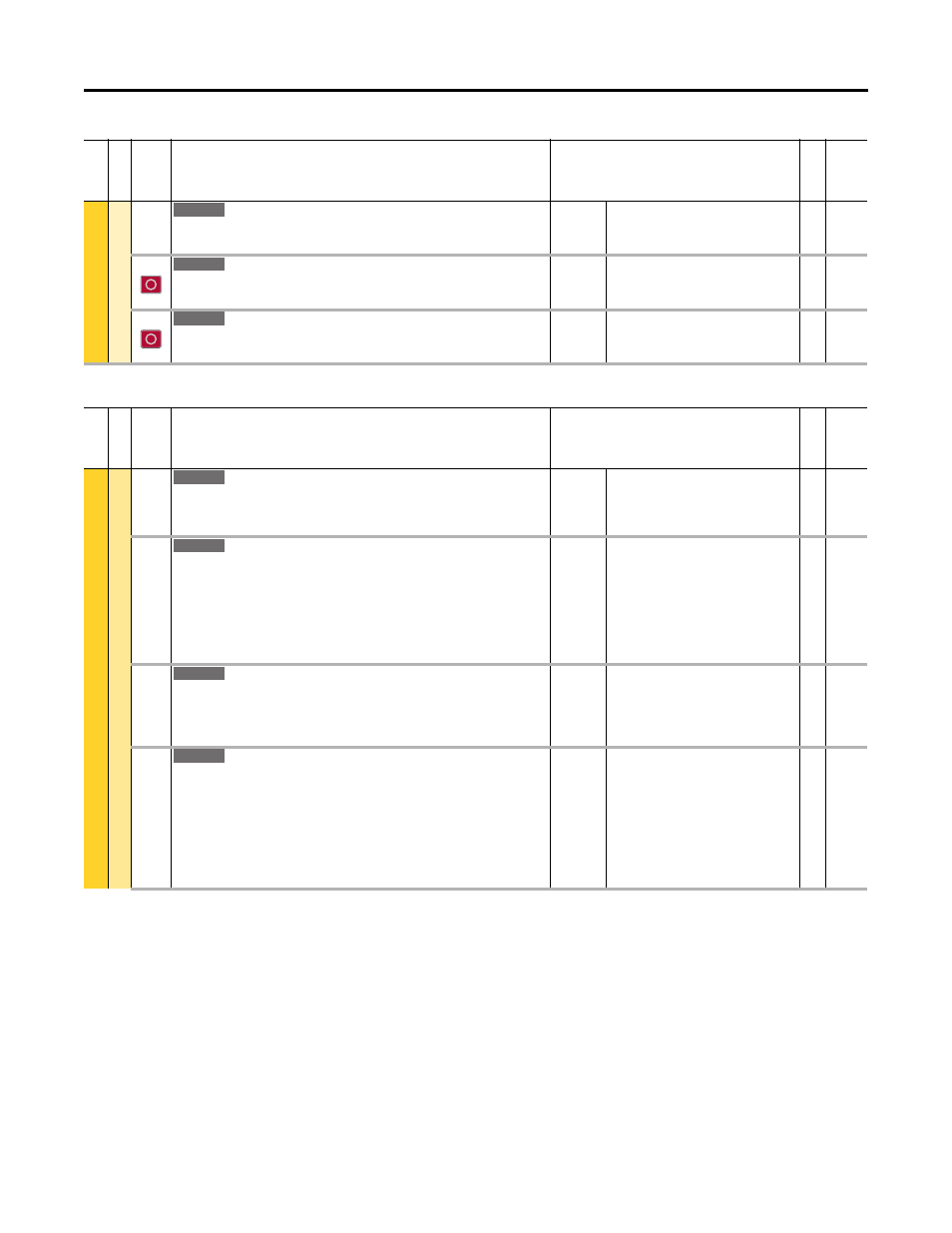
Drive Port 0 Parameters
AP
PL
IC
AT
IONS
Sp
in
dl
e Or
ien
t
1592
SO Decel Time
Spindle Orientation Deceleration Time
Sets the deceleration rate used during positioning.
Units:
Default:
Min/Max:
Secs
10.00
0.00 / 3600.00
RW Real
1593
SO Fwd Vel Lmt
Spindle Orientation Forward Velocity Limit
Sets the forward speed used during positioning.
Units:
Default:
Min/Max:
Hz / RPM
30.00
0.00 / 40000.00
RW Real
1594
SO Rev Vel Lmt
Spindle Orientation Reverse Velocity Limit
Sets the reverse speed used during positioning.
Units:
Default:
Min/Max:
Hz / RPM
–30.00
–40000.00 / 0.00
RW Real
Fi
le
Grou
p
No.
Display Name
Full Name
Description
Values
Re
ad
-W
ri
te
Da
ta
T
ype
755
755
755
Fi
le
Grou
p
No.
Display Name
Full Name
Description
Values
Rea
d-W
ri
te
Da
ta T
ype
APPLIC
AT
ION
S
Id
C
ompe
n
sa
ti
on
1600
Id Comp Enbl
Id Compensation Enable
Enables or disables the Id compensation calculation. This selection is active only in
motor control mode flux vector induction (P35 [Motor Ctrl Mode] = 3 “Induction FV”).
Default:
Options:
0 = “Disable”
0 = “Disable”
1 = “Enable”
RW 32-bit
Integer
1601
Id Comp Mtrng 1
Id Compensation Motoring 1
Sets Id compensation value (in p.u.) at Iq = P1602 [IdCompMtrng 1 Iq] (in p.u.) for
motoring operation. Id compensation = [Id Comp Mtrng 1] x IqCmd (in p.u.) for IqCmd
= between 0 and P1602 [IdCompMtrng 1 Iq]. 1.0 p.u. is scaled to the motor rated
current.
This parameter is active only in motor control mode flux vector induction (P35 [Motor
Ctrl Mode] = 3 “Induction FV”).
Default:
Min/Max:
0.0000
–/+1.0000
RW Real
1602
IdCompMtrng 1 Iq
Id Compensation Motoring 1 Iq
Sets Iq value (in p.u.) at which P1601 [Id Comp Mtrng 1] (in p.u.) is specified. This
parameter is active only in motor control mode flux vector induction (P35 [Motor Ctrl
Mode] = 3 “Induction FV”).
Default:
Min/Max:
0.2500
0.0000 / 5.0000
RW Real
1603
Id Comp Mtrng 2
Id Compensation Motoring 2
Sets Id compensation value (in p.u.) at Iq = P1604 [IdCompMtrng 2 Iq] (in p.u.) for
motoring operation. Id compensation = P1601 [Id Comp Mtrng 1] + (Id Comp Mtrng 2 –
Id Comp Mtrng 1) x (IqCmd - IdCompMtrng 1 Iq) x 1/(IdCompMtrng 2 Iq – IdCompMtrng
1 Iq) for IqCmd = between IdCompMtrng 1 Iq and IdCompMtrng 2 Iq. 1.0 p.u. is scaled to
the motor rated current.
This parameter is active only in motor control mode flux vector induction (P35 [Motor
Ctrl Mode] = 3 “Induction FV”).
Default:
Min/Max:
0.0000
–/+1.0000
RW Real
755
755
755
755