Rockwell Automation 21G PowerFlex 750-Series AC Drives Programming Manual User Manual
Page 56
56
Rockwell Automation Publication 750-PM001J-EN-P - October 2014
Chapter 3
Drive Port 0 Parameters
MOT
O
R CONTROL
Mt
r Ctr
l O
pti
on
s
40
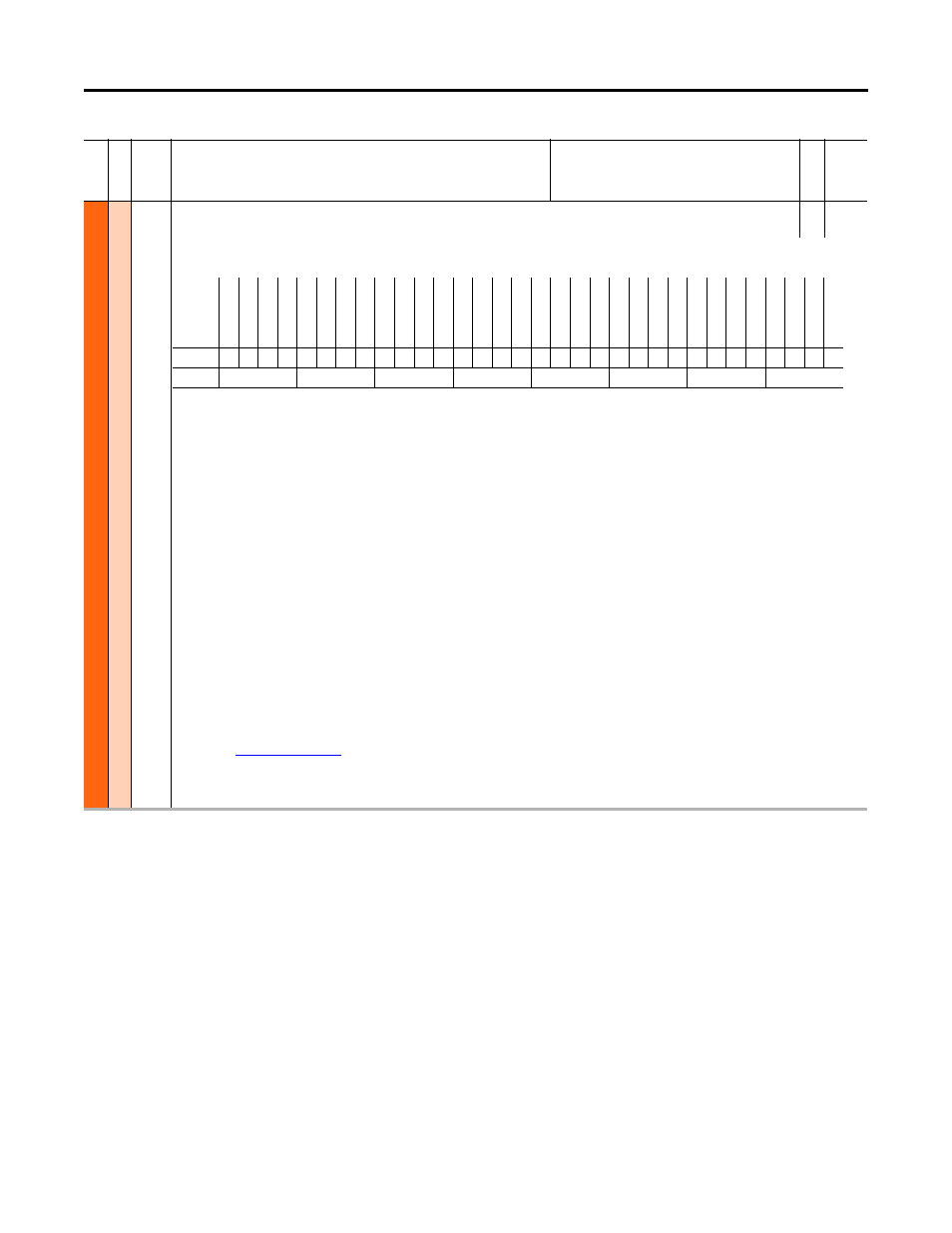
Mtr Options Cfg
Motor Options Configuration
RW 32-bit
Integer
Configuration of motor control-related functions. For motors above 200 Hz, a carrier frequency of 8 kHz or higher is recommended. Consider drive derate and motor
lead distance restrictions.
Bit 0 “Zero TrqStop” – Configures stopped condition when in torque mode. 0 = wait for zero speed before shutting off drive output, 1 = wait for zero torque before
shutting off drive output.
Bit 1 “Trq ModeStop” – Configures stopping behavior when in torque mode. 0 = remain in torque mode, 1 = switch to speed mode
Bit 2 “Trq ModeJog” – Configures jogging behavior when in torque mode. 0 = remain in torque mode, 1 = switch to speed mode
Bit 3 “EnclsTrqProv” – Enables encoderless mode when using the torque prove function. 0 = Disabled, 1 = Enabled. Bits 0 and 1 of P1100 [Trq Prove Cfg] must also
be set to use this mode.
Bit 4 “Mtr Lead Rev” – Reverses the phase rotation of the applied voltage, effectively reversing the motor leads. 0 = Not Reversed, 1 = Reversed
Bit 5 “Reflect Wave” – Enables reflected wave voltage protection for long motor cables. 0 = Disabled, 1 = Enabled
Bit 6 “RS Adaption” – Adapts for changes in motor stator resistance due to motor temperature. Active only in FV motor control mode with feedback. 0 = Disabled, 1
= Enabled
Bit 7 “PWM Type Sel” – Configures 3 Phase / 2 Phase switching of the power devices. 0 = 3 Phase modulation with auto switchover to 2 phase modulation. 1 = Full
time 3 phase modulation (no switchover)
Bit 8 “AsyncPWMLock” – Configures Synchronous / Asynchronous switching of the power devices. 0 = Automatically changes between synchronous and
asynchronous. 1 = Asynchronous switching only.
Bit 9 “PWM FreqLock” – Configures switching frequency of the power devices while in FV motor control mode without feedback. 0 = switching frequency
automatically reduces to 2 kHz at low speeds (best performance), 1 = switching frequency does not reduce (setting used when switching frequency reduction is
undesirable)
Bit 10 “DB WhileStop” – Enables operation of the dynamic brake transistor while the drive is stopped. 0 = Disabled, 1 = Enabled
Bit 11 “Elect Stab” – Enables stability control for Sensorless Vector and V/Hz motor control modes. 0 = Disabled, 1 = Enabled
Bit 12 “Xsistor Diag” – Enables power transistor diagnostic test at each start command. Recommended to set to Disabled if an output filter is installed with the
drive. Refer to
for additional information. 0 = Disabled, 1 = Enabled
Bit 13 “Common Mode” – Enables the common mode reduction modulator to reduce the common mode voltage generated by the pulse width modulated inverter.
Bit 15 “Jerk Select” – Limits the rate of change to the velocity reference for improved current limiting. This setting applies only to Sensorless Vector and V/Hz motor
control modes. 0 = Disabled (0.0 second ramp time achievable), 1 = Enabled (0.0 second ramp time prevented)
Fi
le
Grou
p
No.
Display Name
Full Name
Description
Values
Re
ad
-W
ri
te
Da
ta
T
ype
Options
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Rese
rv
ed
Je
rk S
ele
ct
Not U
sed
Co
mmon Mod
e
Xs
isto
r D
iag
El
ec
t S
ta
b
DB
Wh
ileStop
PWM
F
req
Lo
ck
AsyncPWML
ock
PW
M T
ype
Sel
RS A
daption
Reflec
t W
av
e
Mtr
L
ead
R
ev
En
cl
sT
rq
Pr
ov
(1)
(1) 755 drives only.
Tr
q ModeJog
Tr
q ModeSt
op
Ze
ro
T
rq
St
op
Default
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1
0
0
1
1
0
0
0
1
1
1
0
0
1
1
1
Bit
32 30 29 28 27 26 25 24 23 22 21 20 19 18 17 16 15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0