Rockwell Automation 21G PowerFlex 750-Series AC Drives Programming Manual User Manual
Page 276
276
Rockwell Automation Publication 750-PM001J-EN-P - October 2014
Chapter 5
Embedded Feature and Option Module Parameters
Univ
ersal
F
eedback
Feedback 0
7
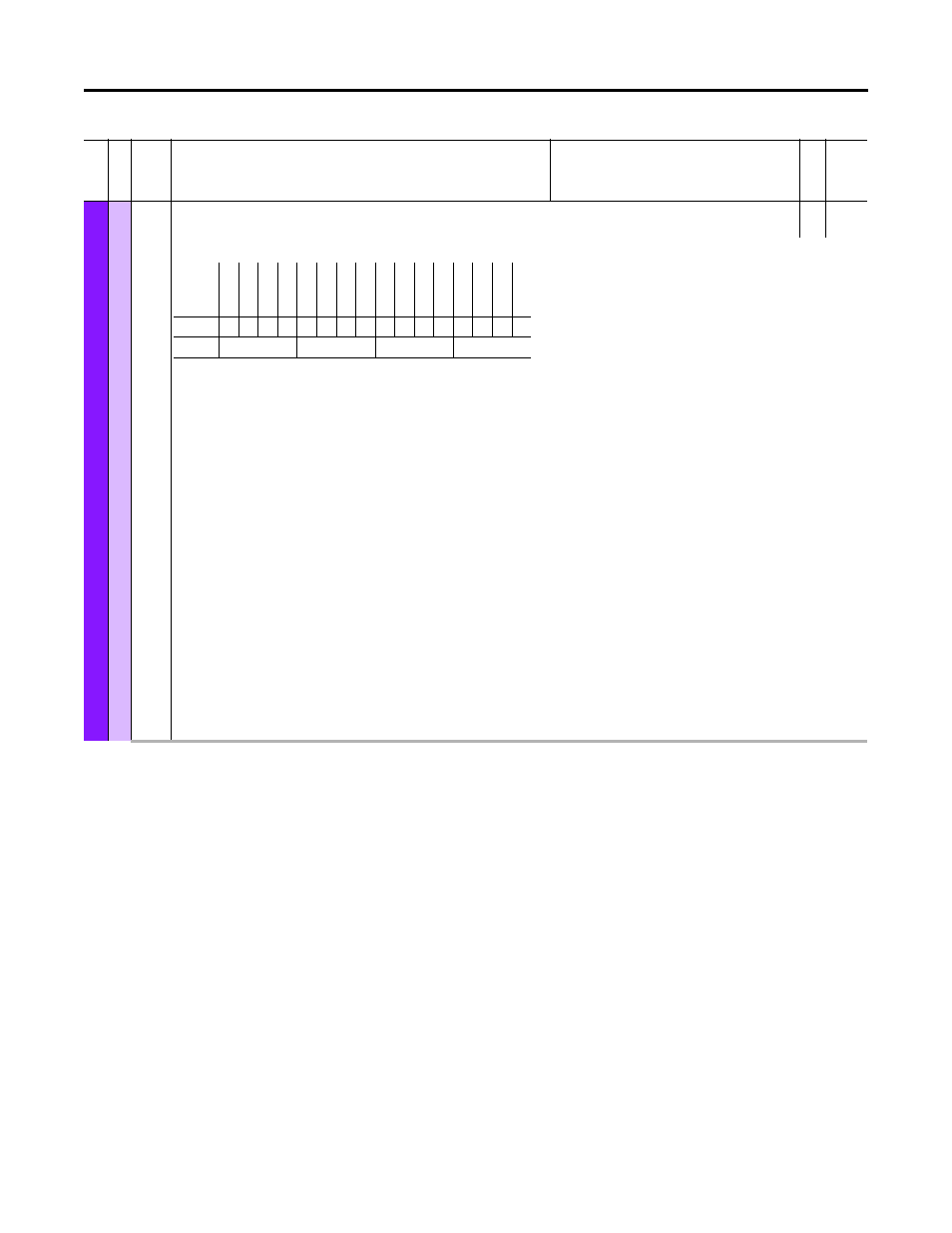
FB0 Identify
Feedback 0 Identify
RO
16-bit
Integer
Displays the used encoder type for the feedback 0 device, e.g. Multi turn, rotary encoder with EnDat 2.1 interface including SIN/COS incremental signals.
Bit 0 “Rotary” – Rotary encoder (incremental type).
Bit 1 “Linear” – Linear encoder (Temposonic and Stahl type).
Bit 2 “Single Turn” – Single turn absolute encoder. This encoder type can only track absolute position for one turn of the encoder shaft.
Bit 3 “Multi Turn” – Multiturn absolute encoder. This encoder type can track absolute position across multiple encoder turns.
Bit 4 “Enh Resol” – High resolution encoder. This bit is set if there are more than 24 bits resolution (full digital encoders) or the PPR is greater than or equal to
16384. If this bit is set, Bit 1 “24-bit Resol” in parameter [FB0 Cfg] should also be set.
Bit 5 “Sin Cos” – Sine / Cosine encoder, abbreviated SC. This encoder type makes use of an analog sine/cosine signal pair. This is the analog counterpart to the A
quad B incremental encoder. A fine interpolation algorithm is sometimes used to provide high resolution feedback by processing the full sine/cosine cycle. Lower
resolution feedback is also implemented by counting only zero crossings.
Bit 6 “Full Digital” – Full digital encoder, abbreviated FD. Refers to devices that use a serial communication interface, such as a clock and data lines to transmit data
to/from the module. The analog (sine/cosine) signals are not used with a Full Digital interface.
Bit 7 “Incremental” – Typically an A quad B encoder, with optional Z (marker) channel. “A Channel Only” is possible (no B channel), but rarely used because this
configuration lacks direction capability. Single channel incremental could be used to provide a speed (magnitude only) reference signal.
Bit 8 “EnDat 2p1” – Heidenhain absolute encoder with EnDat 2.1 command set support. EnDat is a proprietary protocol developed by Heidenhain. It is a
synchronous, bidirectional serial interface. EnDat is a full digital interface.
Bit 9 “EnDat 2p2” – Heidenhain EnDat 2.2 command set support. This version supports incremental as well as absolute encoders.
Bit 10 “Hiperface” – Dedicated serial interface protocol for Stegmann devices. Hiperface is short for High Performance Interface. This interface makes use of both
analog (sine/cosine) and digital (clock/data) signals.
Bit 11 “BiSS” – Bidirectional Synchronous Serial Interface. This is an open protocol and is hardware-compatible with SSI. Both mixed SC with digital and FD types
are supported. Presently, only BiSS encoders from Hengstler GmbH are supported.
Bit 12 “SSI” – Synchronous Serial Interface. Only the mixed SC with digital version is supported. Rotary version is mixed analog/digital, linear version is full digital.
Bit 13 “Temposonic” – Linear position sensor from MTS Systems Corp. Full digital SSI interface, absolute device uses magnetostrictive technology.
Bit 14 “Stahl” – Linear position sensor from Stahl GmbH. Full digital SSI interface, absolute device uses an encoded rail.
Fi
le
Grou
p
No.
Display Name
Full Name
Description
Values
Re
ad
-W
ri
te
Da
ta
T
ype
Options
Re
ser
ve
d
Stahl
Te
mpos
onic
SSI
Bi
SS
Hi
per
fa
ce
EnDa
t 2p2
EnDa
t 2p1
Incr
emen
tal
Fu
ll D
ig
ita
l
Si
n C
os
Enh Resol
Mu
lti T
urn
Si
ngl
e T
ur
n
Li
ne
ar
Ro
tar
y
Default
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Bit
15 14 13 12 11 10 9
8
7
6
5
4
3
2
1
0
0 = Condition False
1 = Condition True