11 system bus "can on board – Lenze 8400 StateLine User Manual
Page 567
Lenze · 8400 StateLine · Reference manual · DMS 12.0 EN · 06/2014 · TD05/TD14
567
11
System bus "CAN on board"
11.12
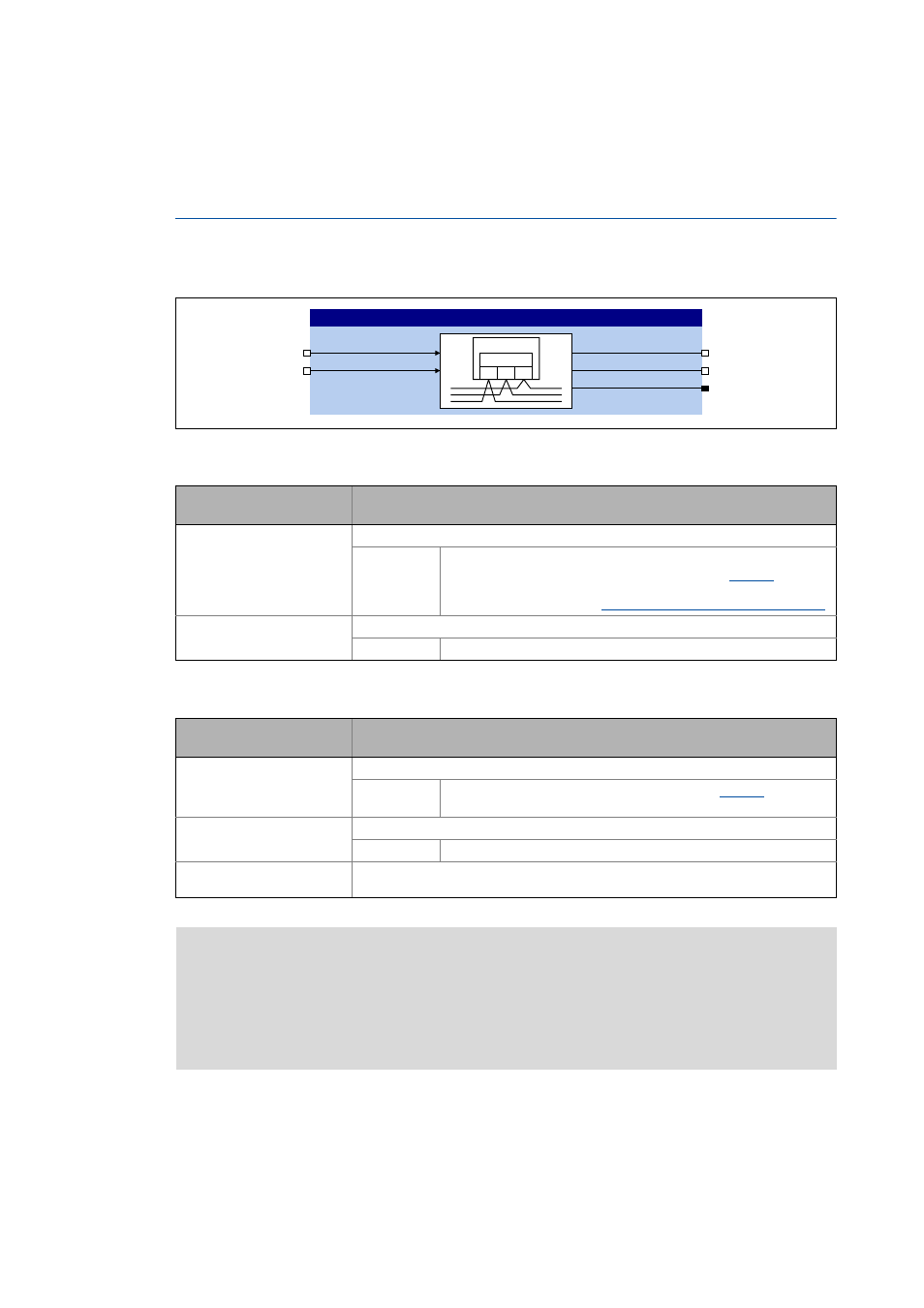
Internal interfaces | System block "LS_CANManagement"
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
11.12
Internal interfaces | System block "LS_CANManagement"
This function extension is only available from version 04.00.00!
The LS_CANManagement system block serves to control internal functions of the CAN driver (reset
node and re-initialisation) and to display the "Operational" status as well as the node address
(analogous to the 9300 ServoPLC and ECS devices).
Inputs
Outputs
Identifier
Data type
Information/possible settings
bResetNode
BOOL
Reset node
TRUE Carry out reset node
• If the controller is configured as CAN master in
, the NMT
command "Start Remote Node" is sent to all nodes at the bus
(broadcast telegram).
Network management telegram (NMT)
bReInitCAN
BOOL
Reinitialisation
TRUE Reinitialise "CAN on board" interface.
Identifier
Data type
Value/meaning
bFail
BOOL
Fault
TRUE An event according to the error configuration in
has
occurred
bOperational
BOOL
"Operational" status signal
TRUE The system bus is in the "Operational" status
wNodeID
WORD
Output of the node address
Note!
If a "Bus off" error is detected, the "CAN on board" interface will automatically be
reinitialised after 1 second.
Hence, 1 second after the "Bus off" has occurred, the controller will automatically be
active again on the system bus ("Auto bus off recovery").
/6B&DQ0DQDJHPHQW
E5HVHW1RGH
E5H,QLW&DQ
E)DLO
E2SHUDWLRQDO
Z1RGH,'
&* &/ &+
;