5 pole position identification without motion, Pole position identification without motion, Can be avoided – Lenze 8400 StateLine User Manual
Page 197: 5motor control (mctrl)
Lenze · 8400 StateLine · Reference manual · DMS 12.0 EN · 06/2014 · TD05/TD14
197
5
Motor control (MCTRL)
5.8
Sensorless control for synchronous motors (SLPSM)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.8.5
Pole position identification without motion
This function extension is available from version 11.00.00!
From version 11.00.00 onwards, when sensorless control is active for synchronous motors (SLPSM),
the rotor displacement angle is identified with every controller enable in the Lenze setting and thus
a jerk in the machine after controller enable can be avoided.
The "Pole position identification without motion" is able to identify the electrical rotor
displacement angle with an accuracy of up to 10°. The identification takes 1 ... 15 ms depending on
the motor. The function is preset in the Lenze setting so that no further settings need to be made in
the majority of cases. In order to get the same behaviour as before, the function can be deactivated
in
.
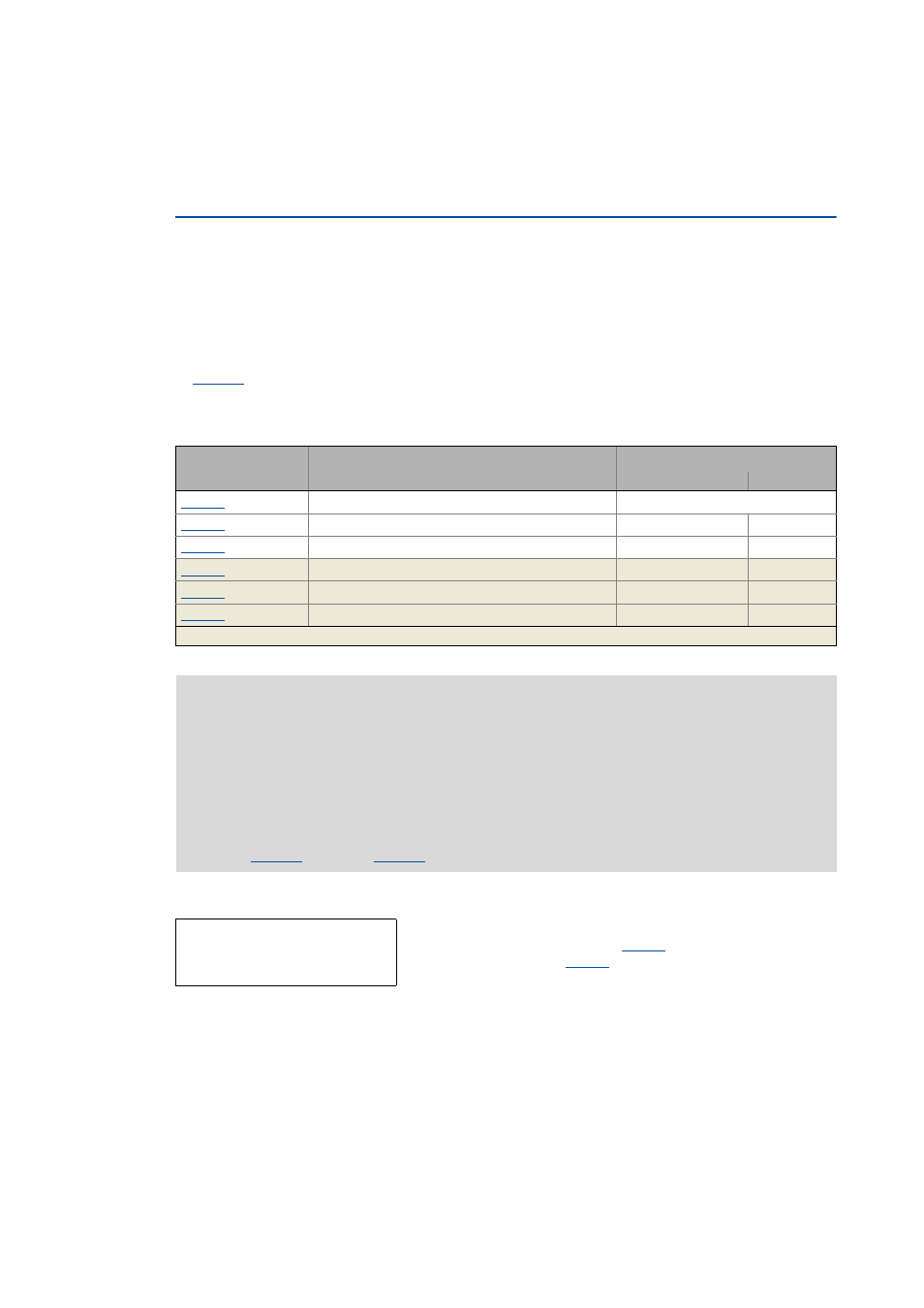
Short overview of the relevant parameters:
• The stator time constants can be calculated based on the following formula:
Parameter
Info
Lenze setting
Value Unit
Pole position identification
1: On
PLI: Adaptation of time period PLI in operation
0
PLI: Adaptation of ident angle PLI in operation
0 °
PLI: Degree of optimisation
- %
PLI: Identification time
- ms
PLI: Identified rotor displacement angle
- °
Highlighted in grey = display parameter
Note!
In case of synchronous motors with a stator time constant < 1 ms, the pole position
identification is not executed since the resulting test current pulse could exceed the
permissible motor current.
• This, however, only affects very few synchronous motors with very low power (e.g.
Lenze motor MDSKS-020-13-300 with rated power of 40 W).
• A non-executed pole position identification can be recognised by the display
= 0 % and
= 0 ms.
T
S
= stator time constant
L
ss
= Motor stator leakage inductance (
)
R
s
= Motor stator resistance (
)
T
s
[ms]
L
ss
[mH]
R
s
Ω
[ ]
--------------------
=