5motor control (mctrl) – Lenze 8400 StateLine User Manual
Page 221
Lenze · 8400 StateLine · Reference manual · DMS 12.0 EN · 06/2014 · TD05/TD14
221
5
Motor control (MCTRL)
5.10
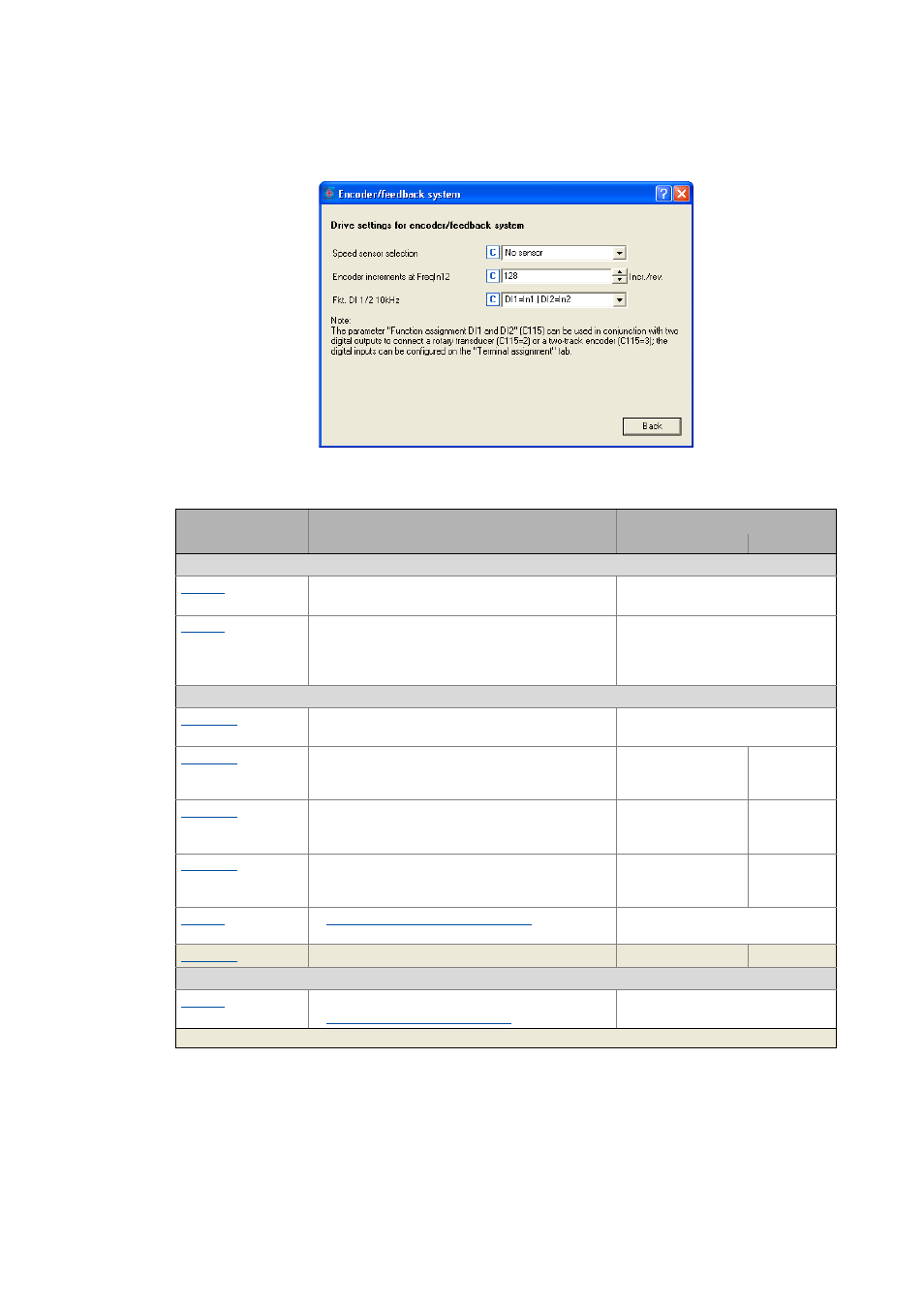
Encoder/feedback system
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Parameterisation dialog in the »Engineer«
Short overview of the relevant parameters:
Parameter
Info
Lenze setting
Value Unit
Encoder selection / General settings
Speed sensor selection
• Source of feedback signal for speed control.
0: No sensor
Position encoder selection
•
From version 12.00.00
• Selection of the speed signal, the
dnMotorPosAct_p position signal is derived from.
0: no sensor: nSpeedSetValue_a
Settings for HTL encoder at DI1/DI2
Fkt. DI 1/2 10kHz
• Function of the digital inputs DI1 and DI2
0: DI1=In1 | DI2=In2
FreqIn12: Encoder increment
• If the digital inputs DI1 and DI2 are used as
encoder inputs.
128 Inc/rev.
FreqIn12: Encoder scanning time
• If the digital inputs DI1 and DI2 are used as
encoder inputs.
10 ms
FreqIn12: Encoder filter time
• If the digital inputs DI1 and DI2 are used as
encoder inputs.
1.0 ms
Encoder evaluation method DigIn12 ( 224)
1: Low-resolution encoder
(StateLine)
Actual value - HTL encoder FreqIn12
- rpm
Monitoring
Resp. to encoder open circuit HTL
Encoder open-circuit monitoring ( 250)
1: Fault
Highlighted in grey = display parameter