7technology applications – Lenze 8400 StateLine User Manual
Page 333
Lenze · 8400 StateLine · Reference manual · DMS 12.0 EN · 06/2014 · TD05/TD14
333
7
Technology applications
7.3
TA "actuating drive speed (AC Drive Profile)"
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
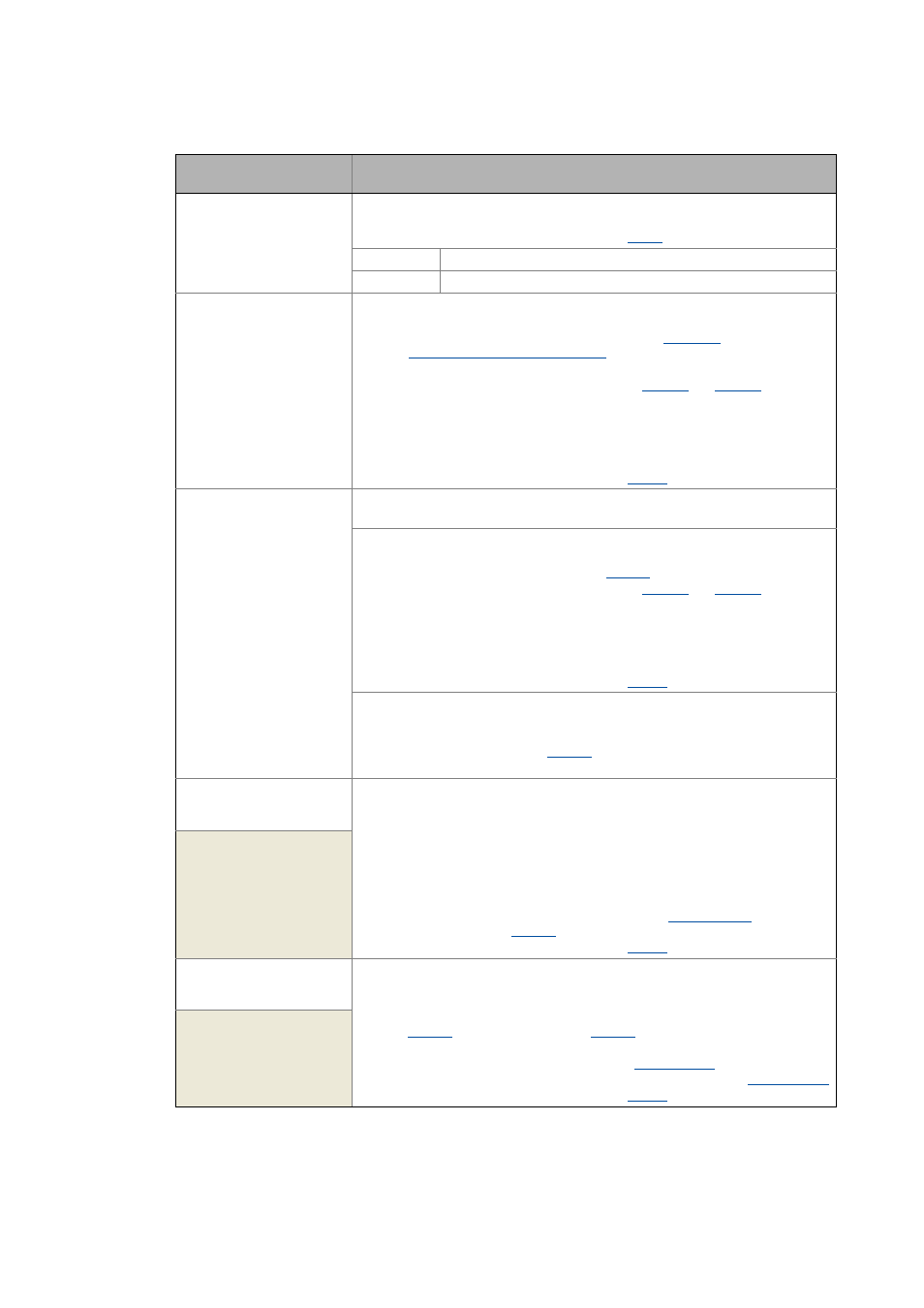
bRLQCcw
BOOL
Activate counter-clockwise rotation (fail-safe)
• Input only effective in case of local control (NetCtrl=0)
• For a detailed functional description see the
FB.
FALSE Quick stop
TRUE Counter-clockwise rotation
nMainSetValue_a
INT
Speed setpoint via fieldbus in [rpm]
• Input only effective in case of setpoint selection via fieldbus (NetRef=1)
• This input is evaluated with the speed scaling set in
(AC Drive Attribute
22).
Scaling of speed and torque values
• An absolute value is created internally (the sign has no meaning).
• Offset and gain of this input signal can be set in
signal adjustment of a setpoint encoder.
• The setpoint is transformed to a speed setpoint in the setpoint encoder via a
ramp function generator with linear or S-shaped ramps.
• Upstream to the ramp function generator, a blocking speed masking function
and a setpoint MinMax limitation are effective.
• For a detailed functional description see the
FB.
nAuxSetValue_a
INT
Local speed setpoint (speed mode) or torque setpoint (torque mode)
• Input only effective in case of local setpoint selection (NetRef=0)
When "speed mode" is set, the following applies:
• The input value is interpreted as speed setpoint.
• Scaling: 16384 ≡ 100 % reference speed (
)
• Offset and gain of this input signal can be set in
signal adjustment of a setpoint encoder.
• The setpoint is transformed to a speed setpoint in the setpoint encoder via a
ramp function generator with linear or S-shaped ramps.
• Upstream to the ramp function generator, a blocking speed masking function
and a setpoint MinMax limitation are effective.
• For a detailed functional description see the
FB.
When "torque mode" is set, the following applies:
• The input value is interpreted as torque setpoint.
(Input nAuxSetValue_a is internally connected to input nTorqueGenLim_a).
• Scaling: 16384 ≡ 100 % M
max
• The speed setpoint is internally permanently set to "100 %".
bJogSpeed1
bJogSpeed2
BOOL
Selection inputs for override fixed setpoints (JOG setpoints)
• Inputs only effective in case of local setpoint selection (NetRef=0)
• These selection inputs can be used to activate a fixed setpoint for the setpoint
generator instead of the setpoint applied to the nAuxSetValue_a input.
• The four selection inputs are binary coded, therefore 15 fixed setpoints can be
selected.
• In case of binary coded selection "0" (all inputs = FALSE or not assigned), the main
setpoint applied to the nAuxSetValue_a input is active.
• The selection of the fixed setpoints is carried out in
in [%] based
• For a detailed functional description see the
FB.
bJogSpeed4
bJogSpeed8
BOOL
bJogRamp1
bJogRamp2
BOOL
Selection inputs for alternative acceleration/deceleration times
• The four selection inputs are binary coded, therefore 15 alternative
acceleration/deceleration times can be selected.
• In case of binary selection "0" (all inputs = FALSE or not assigned), the acceleration
) set for the main setpoint are
active.
• Alternative acceleration times are selected in
• The selection of the alternative deceleration times is carried out in
• For a detailed functional description see the
FB.
bJogRamp4
bJogRamp8
BOOL
Identifier
Data type
Information/possible settings