Block, Ls_motioncontrolkernel, 8basic drive functions (mck) – Lenze 8400 StateLine User Manual
Page 392
8
Basic drive functions (MCK)
8.2
Internal interfaces | System block "LS_MotionControlKernel"
392
Lenze · 8400 StateLine · Reference manual · DMS 12.0 EN · 06/2014 · TD05/TD14
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
In the interconnection previously shown, the Motion Control Kernel monitors every interface. Some
of the signals such as a quick stop request or a DC-injection braking request are directly passed
through to the motor control. However, other signals are passed through or modified depending on
the operating mode (e.g. synchronising a setpoint selection via ramp function).
8.2
Internal interfaces | System block "LS_MotionControlKernel"
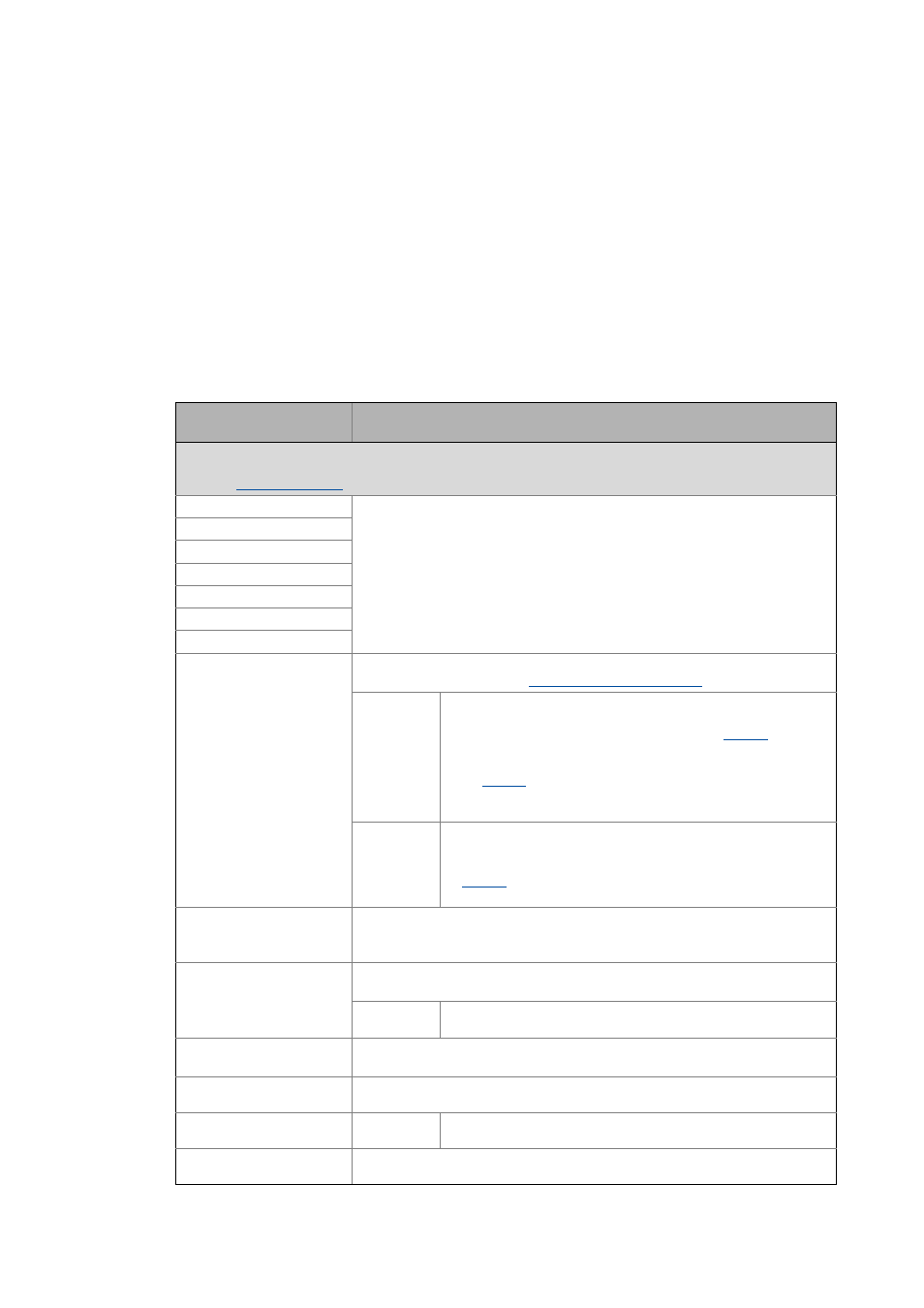
In the Function Block editor, the system block LS_MotionControlKernel provides the interfaces to
the Motion Control Kernel.
Inputs
Identifier
Data type
Information/possible settings
Control and setpoint signals for motor control
The purpose of the following inputs is to transfer control signals and setpoints to the internal motor control
function (
bPosCtrlOn
Inputs of 8400 StateLine have no function!
bDeltaPosOn
dnDeltaPos_p
dnPosSetValue_p
bPosDerivativeOn
bMotorRefOffsetOn
dnMotorRefOffset_p
bQspOn
BOOL
Trigger quick stop (QSP) via the MCK
• Also see device command "
Activate/deactivate quick stop
".
TRUE Activate quick stop
• Motor control is decoupled from the setpoint selection and,
within the deceleration time parameterised in
, the motor
is brought to a standstill (n
act
= 0).
• A pulse inhibit is set if the auto-DCB function has been activated
via
.
•
The motor is kept at a standstill during closed-loop operation
(function in preparation).
FALSE Deactivate quick stop
• The quick stop is deactivated if no other source for the quick stop
is active.
•
displays a bit code of active sources/causes for the quick
stop.
nPWMAngleOffset
INT
Angular offset input
• Scaling: 16384 ≡ 100 %
• Setting range: 0 ... 199.99 %
bSpeedCtrlIOn
BOOL
Directly set the I-component of speed controller
• In order to statically specify a minimum torque, e.g. when a load is being lifted.
TRUE Se the I-component of the speed controller to the value
nSpeedCtrlI_a.
nSpeedCtrlI_a
INT
I-component of the speed controller
• Value is adopted in the case of a FALSE-TRUE edge at the input bSpeedCtrlIOn.
nSpeedSetValue_a
INT
Rotation speed/velocity setpoint
bTorquemodeOn
BOOL
TRUE Switch on torque-controlled operation
nTorqueSetValue_a
INT
Torque setpoint