5motor control (mctrl) – Lenze 8400 StateLine User Manual
Page 225
Lenze · 8400 StateLine · Reference manual · DMS 12.0 EN · 06/2014 · TD05/TD14
225
5
Motor control (MCTRL)
5.10
Encoder/feedback system
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Low speeds (except for edge counting)
For the first method (
= 1), the minimum speed that can be measured depends on the
encoder resolution.
The quantisation error
• is independent of the encoder resolution,
• exclusively depends on the encoder quality (encoder errors).
• at least amounts to 0.5 rpm.
Internal arithmetic operations automatically maintain the minimally required value of the scanning
time in order to achieve maximum dynamics.
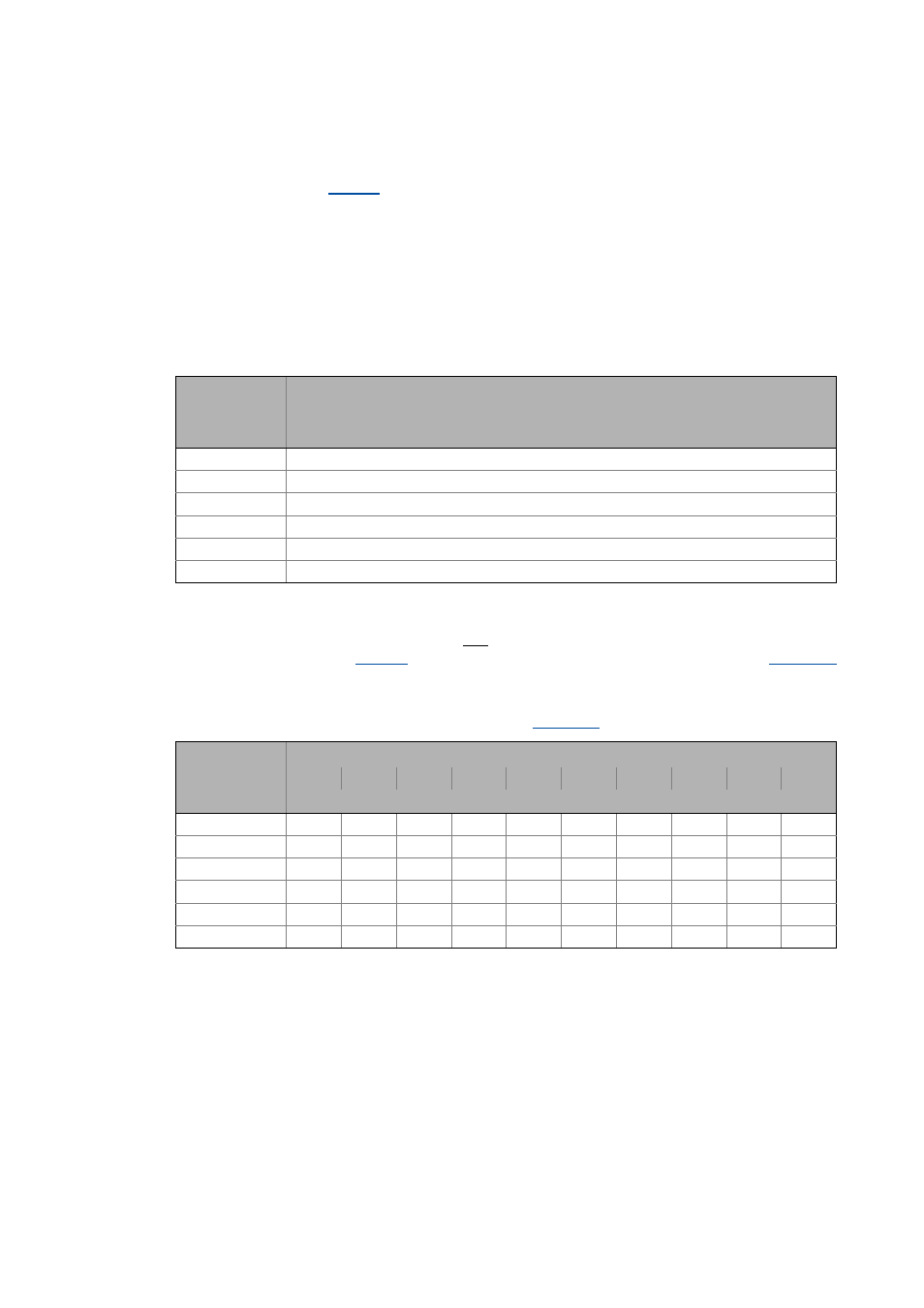
Low speeds with edge counting
The minimum speed that can be measured and the quantisation error of speed measurement in the
edge-counting procedure (
= 3) depend on the scanning time that can be set in
and the encoder resolution.
Depending on accuracy and the requirements with regard to the dynamic performance, the
respective scanning time must be selected and set in
:
Encoder
resolution
(Number of
increments)
Min. measurable speed in [rpm]
8
16
16
8
32
4
64
2
128
1
256
0.5
Encoder
resolution
(Number of
increments)
Scanning time [ms]
1
2
5
10
20
50
100
200
500
1000
Min. measurable speed in [rpm]
8
1875
938
375
188
93.8
37.5
18.8
9.4
3.8
1.9
16
938
469
188
94
46.9
18.8
9.4
4.7
1.9
0.9
32
469
234
94
46.9
23.4
9.4
4.7
2.3
0.9
0.5
64
234
117
46.9
23.4
11.7
4.7
2.3
1.2
0.5
0.2
128
117
58.6
23.4
11.7
5.9
2.3
1.2
0.6
0.2
0.12
256
58.6
29.3
11.7
5.9
2.9
1.2
0.6
0.3
0.12
0.06