5motor control (mctrl) – Lenze 8400 StateLine User Manual
Page 209
Lenze · 8400 StateLine · Reference manual · DMS 12.0 EN · 06/2014 · TD05/TD14
209
5
Motor control (MCTRL)
5.9
Parameterisable additional functions
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
General information
This function serves to activate a mode which is used to "catch" a coasting motor during operation
without speed feedback. This means that the synchronicity between controller and motor is to be
adjusted in such a way that a jerk-free transition to the rotating machines is achieved in the instant
of connection.
The drive controller determines the synchronicity by identifying the synchronous field frequency.
Duration
The "catching" process is completed after approx. 0.5 ... 1.5 seconds. The duration is influenced by
the starting value. If the field frequency is not known, we recommend a fixed starting value of 10
Hz (or -10 Hz with systems rotating in negative direction).
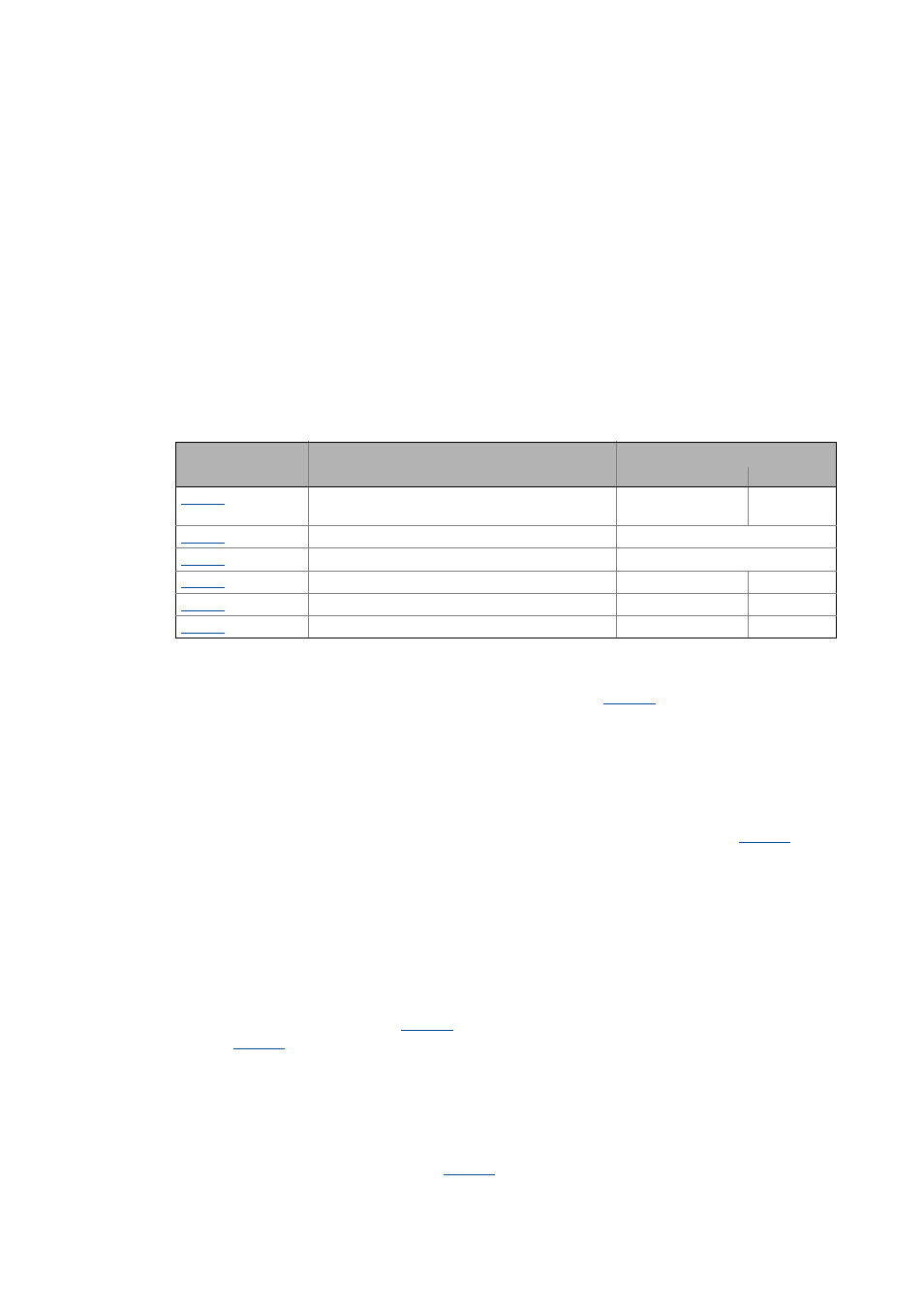
Short overview of the relevant parameters:
How to parameterise the flying restart function:
1. Activate the flying restart circuit by selecting "1: On" in
• Every time the controller is enabled, a synchronisation to the rotating or standing drive
is carried out.
When the Lenze setting is used, most applications do not require additional controller
settings.
If additional settings are necessary, proceed as follows:
2. Define the process and hence the speed range/rotational frequency range in
which
is to be examined by the flying restart circuit:
• positive speed range (n
≥
0 rpm)
• negative speed range (n
≤
0 rpm)
• total speed range
3. Define the starting frequency.
The starting frequency which defines the starting point of the flying restart function is 10
or -10 Hz for processes 0 ... 3 and has been pre-optimised for standard motors.
If process 4 is selected in
, an arbitrary starting frequency can be defined via
. This is especially recommended for motors with higher rated frequencies.
• We recommend to define a starting frequency of approximately 20 % of the rated motor
frequency to enable a safe and fast connection to standing drive systems.
• For systems with a known search speed (e.g. torque-controlled drive systems which are
to synchronise to a defined speed) the starting value can be adapted to reduce the flying
restart time.
4. Set the flying restart current in
Parameter
Info
Lenze setting
Value Unit
Restart on the fly: Flying restart frequency fd_add
(from version 15.00.00)
0.00 Hz
Flying restart fct.: Activate
Off
Flying restart fct.: Process
-n...+n | Start: +10 Hz
Flying restart fct.: Start frequency
5 Hz
Flying restart fct: Int. time
300 ms
Flying restart fct.: Current
25.00 %