2 basic settings, Basic settings, 5motor control (mctrl) – Lenze 8400 StateLine User Manual
Page 157
Lenze · 8400 StateLine · Reference manual · DMS 12.0 EN · 06/2014 · TD05/TD14
157
5
Motor control (MCTRL)
5.6
V/f control (VFCplus + encoder)
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
5.6.2
Basic settings
In order to protect the drive system, carry out the commissioning of the V/f control and the slip
regulator in several steps.
• Detailed information on the single steps can be found in the following subchapters or in the
corresponding subchapters for V/f characteristic control.
Tip!
Information on the further optimisation of the control mode and the adaptation to the real
application is provided in the "
" chapter for the V/f
characteristic control (VFCplus).
Parameterisable additional functions are described correspondingly in the chapter
"
Parameterisable additional functions
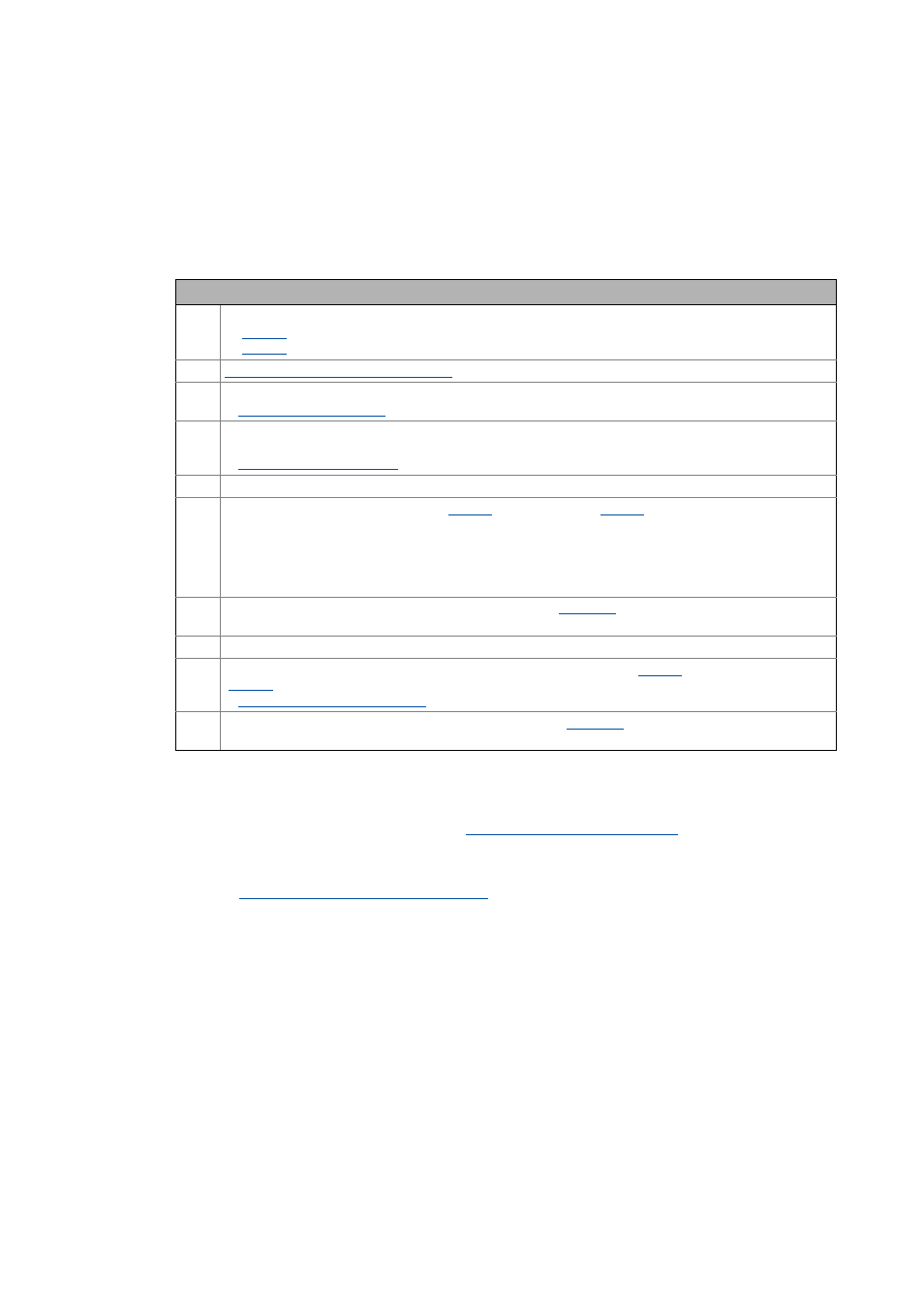
Initial commissioning steps
1. Define the V/f characteristic:
•
= 7: Linear characteristic
•
= 9: Quadratic characteristic
2.
Defining current limits (Imax controller)
3. Parameterise encoder/feedback system.
Encoder/feedback system ( 220)
4. If special motors with a rated frequency other than 50 Hz or with a number of pole pairs ≠ 2 are used, set the
motor parameters according to the motor nameplate.
Motor selection/Motor data ( 105)
5. Define speed setpoint (e.g. 20 % of the rated speed) and enable controller.
6. Check whether the actual speed value (
) ≈ speed setpoint (
) and then inhibit the controller
again.
• In case of a sign reversal between actual value and setpoint, check the connection of the encoder (e.g.
change track A or B of the encoder or invert the actual speed value).
• In case the actual value differs considerably from the setpoint (factor 2), set the motor parameters
according to motor nameplate. Then repeat step 5.
7. To protect the drive, reduce the slip regulator limitation in
• e.g. reduction to half the slip frequency (≈ 2 Hz)
8. Define speed setpoint (e.g. 20 % of the rated speed) and enable controller.
9. In case of a semi-stable operational performance, reduce the reset time (
) or the proportional gain
) of the slip regulator until a stable operation has been achieved.
Parameterising the slip regulator
10. In a final step, increase the slip regulator limitation again in
.
• e.g. increase to twice the slip frequency