Input sen 1cn-4, Input sg 1cn-2, Output → pso 1cn-48 – Yaskawa SGDB User Manual
Page 87: Output → /pso 1cn-49, Input bat 1cn-21, Input bat0 1cn-22, Output → sg 1cn-1, Output → fg 1cn-50
3.2 Setting Parameters According to Host Controller
75
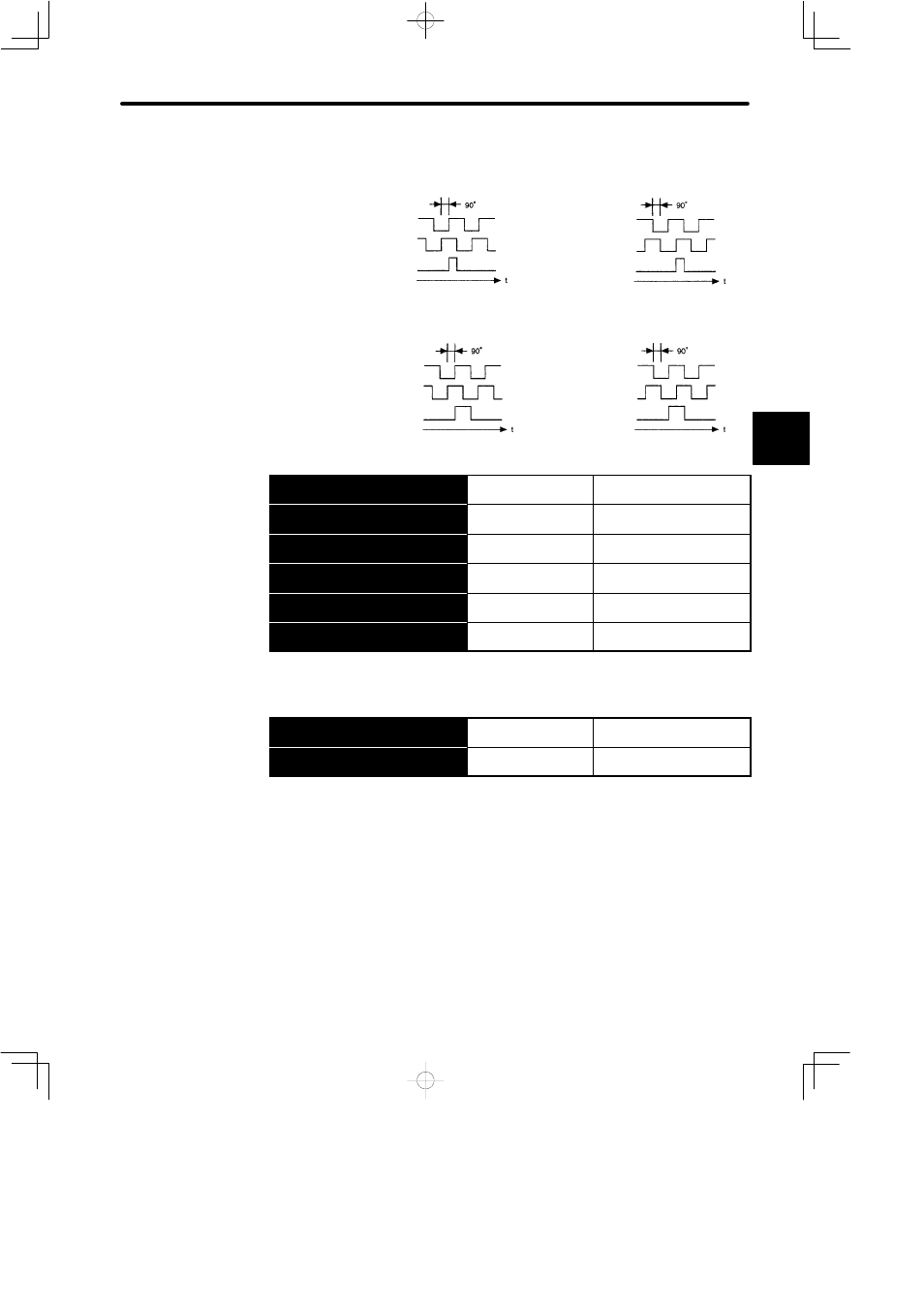
Output Phase Form
Forward rotation
Reverse rotation
Incremental Encoder
Phase A
Phase B
Phase C
Phase A
Phase B
Phase C
Absolute Encoder
Forward rotation
Reverse rotation
Phase A
Phase B
Phase C
Phase A
Phase B
Phase C
→ Input SEN 1CN-4
SEN Signal Input
For Speed/Torque Control
Only
→ Input SG
1CN-2
Signal Ground
For Speed/Torque Control
Only
Output → PSO 1CN-48
Encoder Output
Phase-S
For Speed/Torque Control
and Position Control
Output → /PSO 1CN-49
Encoder Output
Phase-/S
For Speed/Torque Control
and Position Control
→ Input BAT 1CN-21
Battery (+)
For Speed/Torque Control
and Position Control
→ Input BAT0 1CN-22
Battery (−)
For Speed/Torque Control
and Position Control
Use these signals (SEN to BAT0) for absolute encoders. For details, refer to Section
3.8.5 Using an Absolute Encoder.
Output → SG 1CN-1
Signal Ground
For Speed/Torque Control
and Position Control
Output → FG 1CN-50
Frame Ground
For Speed/Torque Control
and Position Control
SG: Connect to 0 V on the host controller.
FG: Connect to the cable shielded wire.
3