Yaskawa SGDB User Manual
Page 170
APPLICATIONS OF Σ-SERIES PRODUCTS
3.8.5 Using an Absolute Encoder cont.
158
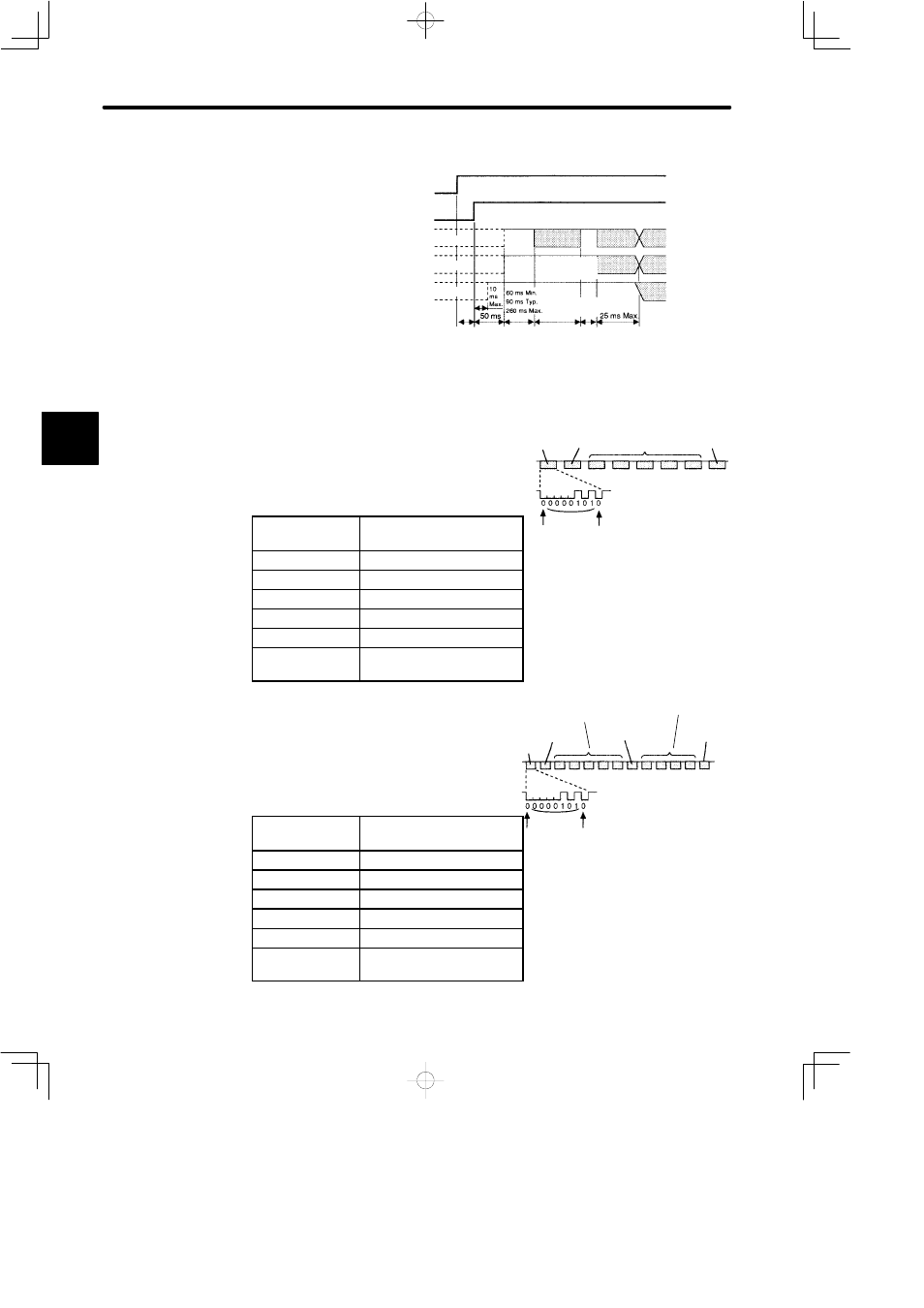
Absolute Data Transmitting Sequence
1. Set the SEN signal at
high level.
2. After 100 ms, set the
system to serial data
reception-waiting-
state. Clear the incre-
mental pulse up/down
counter to zero.
3. Receive eight bytes of
serial data.
4. The system enters a normal incremental operation state approximately 50 ms
after the last serial data is received.
Detailed Specifications of Each Signal
• Specifications of PAO Serial Data:
The number of revolutions is output in five dig-
its.
Data transmission
method
Start-stop synchronization
(ASYNC)
Baud rate
9600
Start bit
1 bit
Stop bit
1 bit
Parity
Even number
Character code
ASCII 7-bit code
Data format
8 characters. As shown on
the right.
• Specifications of PSO Serial Data:
The number of revolutions and the abso-
lute position within one revolution are al-
ways output in five and four digits, respec-
tively.
The
transmission
cycle
is
approximately 40 ms.
Data transmission
method
Start-stop synchronization
(ASYNC)
Baud rate
9600
Start bit
1 bit
Stop bit
1 bit
Parity
Even number
Character code
ASCII 7-bit code
Data format
13 characters. As shown on
the right.
3
Undefined
Rotation count
serial data
Initial incremental
pulse
Incremental
pulse
(Phase A)
(Phase A)
(Phase B)
(Phase B)
Incremental
pulse
Rotation count
serial data
Undefined
Undefined
Initial
incremental
pulse
1 to
3 ms
10 to
15 ms
Approx.
23 ms
“P” or “A”
“+” or “-”
Data
Start bit
Even parity
• Data is P+0000 (CR) or P−0000
(CR) when the number of revolu-
tions is zero.
• The maximum number of revolu-
tions is 99999. If this value is ex-
ceeded, it returns to 0000.
” , ”
“CR”
“P” or “A”
“+” or “-”
Number of
revolutions: “0” to “9”
“+” or “-”
Absolute position
within one revolution:
“0” to “9”
Data
Start bit
Even parity
• Absolute position data within one revolu-
tion is a value before frequency dividing.
(4,096 pulses per revolution)
• Absolute position data increases during
forward rotation (standard setting).
(Not valid in reverse rotation mode)
“CR”